
Abstract
Security in wireless sensor networks is an upcoming field which is quite different from traditional network security mechanisms. Many applications are dependent on the secure operation of a wireless sensor network, and have serious effects if the network is disrupted. Therefore, it is necessary to protect communication between sensor nodes. Key management plays an essential role in achieving security in wireless sensor networks. To achieve security, various key predistribution schemes have been proposed without deployment knowledge. Deployment knowledge can benefit the key predistribution scheme, as the nodes that are likely to be neighbors of each sensor node are assumed, and hence each node does not need to waste its memory to store unnecessary secret information. However, the existing key predistribution schemes require more memory and larger transmission range to achieve the desired connectivity. In order to enhance secure communication among sensor nodes, grid and hexagon deployment models are used. In both the deployment models, the sensor field is divided into equal grids. The keys are distributed from a large key pool randomly and pairwise keys are generated for each pair of sensor nodes. Once the pairwise keys are generated among neighboring nodes, they establish a secure connection and transmit data. We propose a new scheme based on cell splitting concept to improve the security level, in which a hexagon is subdivided in to smaller groups. The performance is evaluated in terms of connectivity and resilience against node capture. The analysis show that the performance is better using cell splitting concept compared to normal hexagon based scheme.
Keywords
Introduction
A sensor network consists of a massive number of small, inexpensive, self-powered devices that can sense, compute, and communicate with other devices. Nodes act as information sources, sensing and collecting data samples from their environment. Wireless sensor networks have a wide range of civil and military applications. Sensor networks are typically characterized by limited power supplies, low bandwidth, small memory sizes and limited energy. When sensor networks are deployed, security becomes important because they are subject to different types of attacks. This leads to a very demanding environment to provide security.
Although secure communication in a wireless sensor network is often an essential system requirement, it is a challenging task due to limited resources, lack of infrastructure, unknown topology and the wireless nature of transmission. Public key encryption is unsuitable because of the limited computing power of sensor nodes. In order to overcome this, many key predistribution schemes have been proposed. The aim is to assign a set of keys called a key ring to each sensor, so as to enable any two sensors in a radio coverage area to establish a secure link and at the same time to maintain the network resiliency against node capture.
Many key predistribution schemes failed to take into account the information on deployment location. However, prior deployment knowledge may be utilized to improve the performance of a random key predistribution scheme. Though it may not be possible to previously know the exact location of a node, it is possible to have an idea about approximate location of a node after deployment. Several key predistribution schemes are developed in which a large pool of key is chosen and keys are assigned to each node randomly by selecting from the large key pool. If two nodes want to communicate with each other they search for a common key space. To identify the common key space between the neighbors, the sensor node will broadcast the message ID to the neighbors. If two nodes share a common key then the nodes start communicating each other. If a common key space does not exist, then the neighboring nodes try to establish a secure communication through intermediate nodes.
Eschenauer and Gligor [2] were the first to propose a probabilistic key distribution scheme based on a random graph construction. This scheme is referred as basic scheme. From a key pool of size S, a set of M distinct keys is randomly selected and is assigned to a sensor node. The size of the key pool S and the size of the key ring M are set to ensure that the network is connected and a pair of sensors holds a common key with high probability. The drawback of this scheme is that it requires large memory to achieve better connectivity.
Blom [1] proposed a key pre-distribution method that allows any pair of nodes in a network to be able to find a pairwise secret key. This scheme exhibits a nice threshold property (λ secure property). So the network is perfectly secure but the connectivity is very poor.
DDHV scheme [3] combined Blom's scheme and the basic scheme. Each node picks some rows randomly from the available key spaces. Two nodes could communicate with each other if they have rows from at least one common key space. Benefited from Blom's scheme, the scheme has better resilience against node capture than the basic scheme. To achieve a higher security, it needs more memory.
DDHV scheme with deployment knowledge assumes grid deployment [4]. In this scheme, nodes are divided into groups and each group is given a subset of key pool. Since nodes pick keys from a smaller pool, less memory is needed to achieve higher connectivity. If adversaries randomly compromise nodes among the entire network, the scheme is more resilient than the basic scheme. However, it could not keep the same performance when adversaries compromise nodes within a small local area.
Liu and Ning also developed a scheme using pre-deployment knowledge [5]. The key pre distribution is developed based on random subset assignment, and the grid-based key predistribution scheme to reduce the fraction of links compromised thereby establishing a secure communication.
Kalindi et al. [6] proposed a Sub-Grid based key vector Assignment scheme that is based on assigning keys to sensors by placing them on a grid. This approach has been further modified by the author with the concept of multiple mappings of keys to nodes. In each mapping, every node gets distinct set of keys that it shares with different nodes. The key assignment is done such that there will be keys in common between nodes in different sub-grids. After deployment, the nodes discover common keys and communicate securely. It has been proved that the scheme achieves identical connectivity compared to EG scheme using a less number of keys in each sensor node.
Wireless Sensor Networks are collection of tiny sensor nodes that are used for sensing and gathering information with limited resources from harsh environments. In all these systems, the critical step is the fusion of data gathered by sensors to synthesize new information [7]. In [9], S. S. Iyengar et al. focus on a different approach for providing solution to the security management by developing Data fusion paradigms for sensor-actuator networks that perform engineering tasks. They took Automation systems as an example for illustration. The five major aspects of automation system are input, output, logic processing, behavior specification and Human Computer Interaction (HCI). Sensors and actuators are transducers that are used to acquire inputs and set outputs respectively. The controller periodically executes logic to determine new output values for actuators. HCI devices are used to specify logic and facilitate operator interaction at run time. The benefit of data fusion is that it provides a systematic approach to commissioning, fault management (detection, isolation, reporting and recovery), programming and security management [8]. Framework for data fusion is based on two important concepts: a conceptual framework and a goal-seeking paradigm. The conceptual framework represents the structure of the system and the goal-seeking paradigm represents the behavior of the system. Since a node contains a simple processor it is infeasible to implement a fully secure communication channel for all links without compromising determinism and performance. Because of the large installed base of such systems, security mechanisms must be designed to mask the uneven conditioning of the environment. The goal seeking formulation and cooperative data fusion tasks associated supports such an implementation.
A goal-seeking paradigm introduced in [8, 9] is an approach to modeling and describing systems that explicitly supports uncertainty management by using additional artifacts and transformations discussed as follows. The system can choose actions from a range of alternate actions. The set of actions includes options for security mechanisms that are available to a future automation system. The choice of security mechanisms is provided, as the environment is a power constrained environment and the node can choose any one from the set based on the available power. These actions represent a choice of decisions that can be made in response to a given or emerging situation. Next, there is range of uncertainties that impact on the success of selected decisions. Uncertainties arise from two sources: first, from an inability to anticipate inputs correctly, either from the automation system or from users, and second, from an incomplete or inaccurate view of the outcome of a decision, even if the input is correctly anticipated. The range of consequences represent outcomes that result from an implementation of system decisions. Consequences are usually outputs that are produced by the system. The system maintains a reflection, which is its view of the environment. The evaluation set has three parameters of interest, namely security of channel, freshness of data and authenticity of data. Assuming a binary range for each of these parameters there are eight possible combinations plus total communication failure, i.e., no data sent. An evaluation mapping is used to compare outcomes of decisions using the performance scale. Ideally, consequences follow from decisions directly. Because of uncertainties the consequence obtained may be more desirable or less desirable, depending on the circumstances. The evaluation mapping produces such an assessment for every consequence-decision pair. The tolerance function establishes a minimum performance level on the evaluation set that can be used to decide whether or not a decision is acceptable. Only a few uncertainties may come to pass when a particular alternate action is selected by the system. Hence, a list of uncertainties must be built that apply to every alternate action. For an action, if the size of the corresponding set of uncertainties is greater than one, then data fusion must be applied. Hence goal-seeking formulation for data fusion helps to distinguish between subjective decisions that resolve uncertainty by involving humans and objective decisions that can be executed by computers. These notions are useful for critical tasks, such as security management in large scale distributed systems.
A key predistribution scheme with hexagon deployment [10, 11] can greatly improve the probability of successful key establishment by constructing a sensor cellular network to predistribute the key. The scheme also decreases the cost of pairwise key establishment.
In this article, cell splitting concept is applied to hexagon, i.e., the area of interest is splitted to smaller areas with prior deployment knowledge. Sensor nodes are divided into same number of groups and each group is deployed into the splitted area. Then pairwise keys are established by distributing secret information among the sensor nodes. Connectivity of the sensor networks is studied based on the transmission range. Security analysis is performed by evaluating the metrics such as global security and local security.
The rest of the article is organized as follows. In Section 2 an overview of hexagon based key predistribution scheme is presented, Section 3 elaborates the Improved Key Predistribution Scheme using Cell Splitting Concept, Section 4 presents the evaluation based on connectivity and security analysis and Section 5 gives the conclusion.
Hexagon Based Key Predistribution Scheme
The sensor field is in the shape of a hexagon, as in Fig. 1. The centre of grid is the deployment point, which is the desired location of a group of nodes. The location of sensor node over the entire sensor field follows some distribution with a probability density function. In most cases, sensor nodes are often assumed to be uniformly deployed, i.e., the uniform distribution. The deployment knowledge can also be modeled using normal distribution as [10],

Hexagon co-ordinate system.

where σ2 is the variance of the distribution. However, other distributions also can be used to model the deployment knowledge other than normal and uniform distribution.
In hexagon based scheme, all adjacent sensor nodes have the same distance. The hexagon system has some advantages over the rectangular system. First, in transmitting data, the signal range is more appropriate than rectangular system. Second, the distance between the neighboring sensor nodes differ, depending on whether the neighboring node is located directly adjacent or diagonal to it [11].
Based on the deployment model shown in Fig. 1, a group of nodes are deployed in a small local area, which causes most neighbors of a node to come from its own group or neighboring groups. In the hexagon based scheme, each sensor node takes its deployment hexagon as the center and share keys with the sensor nodes deployed in its 19 adjacent hexagons. In Fig. 1, all sensor nodes deployed in shaded hexagon can share key with the sensor nodes deployed in hexagon 5. This scheme consists of three phases.
The key predistribution phase is carried out before deploying the sensor nodes in the area of interest. The sensor field is divided into t groups and the key pool S is divided into t × n key space, where n is the number of nodes. The key pools are generated to share more keys with the neighbors. Once the key pools are generated, each sensor node in the deployment group randomly pick up m keys from its corresponding key pool and load in its memory.
Shared Key Discovery Phase
After deployment, if two sensor nodes want to establish a pairwise key, it is necessary to find any common key between the neighboring nodes. If a common key exists, they use this key for secure communication with the broadcasting node. Each sensor node can communicate with the sensor nodes deployed in 19 adjacent squares in the hexagon based scheme as shown in Fig. 1.
Path Key Establishment Phase
If the sensor nodes failed to find a common key, the nodes can establish pairwise keys in the path key establishment phase. When the sensor node broadcasts the message ID, the intermediate node can establish pairwise keys with the source and destination nodes. Otherwise, the intermediate node will broadcast the message until it shares pairwise keys with the neighboring nodes. Then the path key is established.
Improved Key Predistribution Scheme using Cell Splitting Concept
In this article, we propose a new method of cell splitting in the hexagon based scheme. Cell splitting is the process of subdividing a large cell into smaller cells. Each of the splitted cells acts as an individual group and the sensor nodes are deployed in the centre of the area of interest. Each of the sensor nodes have the same memory as that of the nodes deployed in the large hexagon. In mobile communication, cell splitting increases the capacity of a cellular system since it increases the number of times the frequency is reused [12]. Similarly, by defining new fields which have a smaller radius than the original field within the existing field, the transmission range, which is the communication range from one node to the neighboring nodes, is reduced.
We introduce cell splitting in the centre of the area of interest as shown in Fig. 2 because there is a larger node density in the areas around the deployment point while lowest node density in the intersection areas of every three neighboring hexagonal grids. Imagine every area is reduced in such a way that the radius of every field is cut in half. This can be easily shown by considering a circle with radius r. The area covered by such a circle is four times as large as the area covered by a circle with radius r/2. The increased number of field would increase the number of groups over the area of interest [12]. Cell splitting allows a system to grow by replacing large cells with smaller cells. We introduce cell splitting concept to achieve better connectivity within a shorter transmission range and to reduce the fraction of links compromised, i.e., to increase the resilience of the network, thus improving the security level.

Cell splitting.
Our Scheme is built on the top of Blom's key management scheme [1] to derive a pairwise secret key. Our scheme consists of three phases: key predistribution, shared-key discovery and path-key establishment.
In this phase we generate a unique public matrix G and matrices A, B and C. Each node in the group is assigned a unique secret matrix D, while all groups share the unique public matrix G which means every node of both the splitted cells and full hexagonal grids pick a corresponding column from G. Every node of a group picks the corresponding column from matrix G and the corresponding row from that matrix A (each group of the splitted cells). Matrix C is assigned to some number of groups (full hexagonal grid) which is distinct. These selected groups are called basic groups. The remaining groups are non-basic groups and we generate C matrices that have been assigned to its neighboring basic groups as shown in Fig. 3.
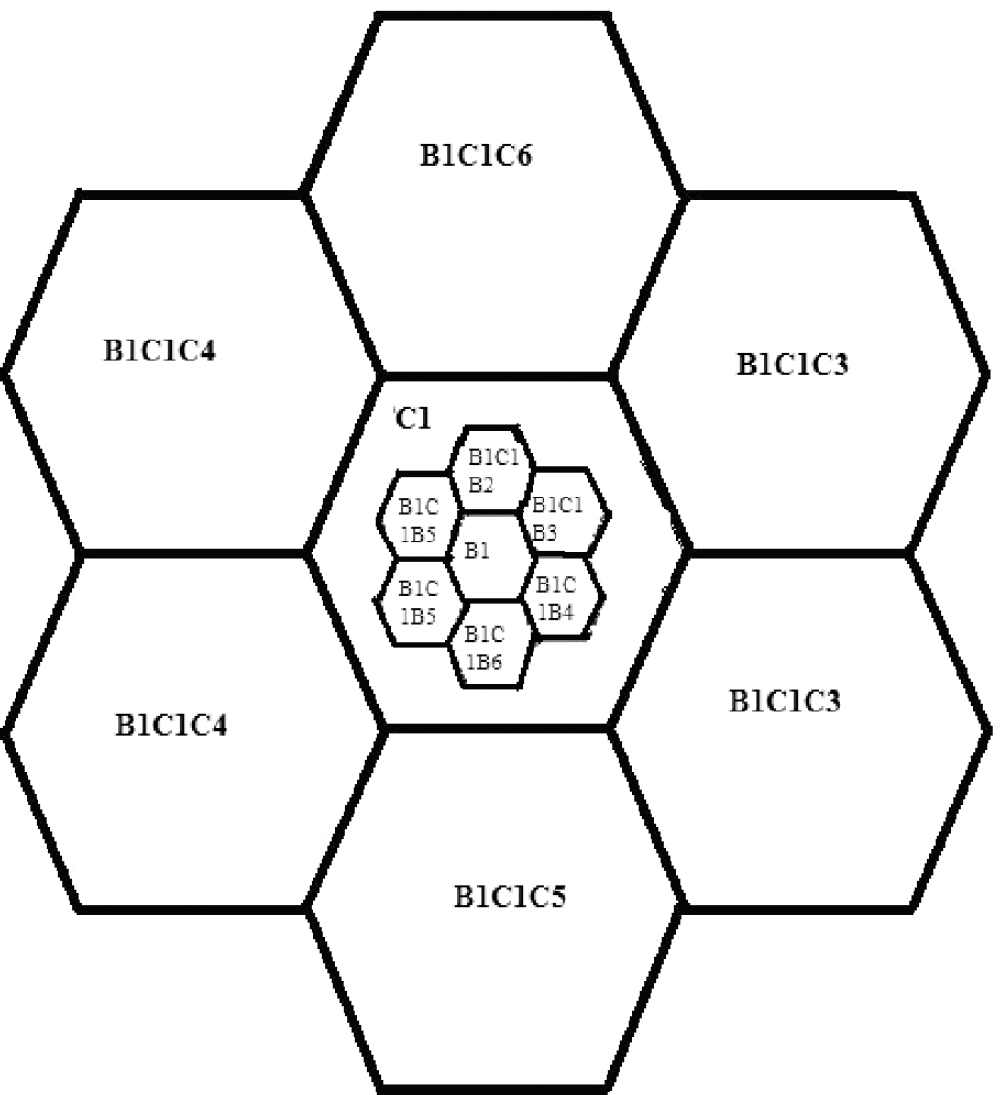
Assignment of B's and C's in cell splitted hexagonal grids.
The area of interest is divided in to equal grids and the nodes are divided into equal groups and are deployed in the area. We generate a (λ + 1) × N public matrix G, and (λ+ 1) × (λ+ 1) symmetric matrix D. The secret matrix is denoted as (D.G)T. Pairwise keys for a group of nodes is generated as K = AG = (D.G)TG, where (D.G)T is the transpose of D.G [1]. Each node stores the corresponding row of A and column of G in its memory. After deployment, the column of G for the two nodes i and j are exchanged. Pairwise keys can be obtained by calculating the dot product of their own row of the secret matrices and the column of G.
After deployment, each node needs to discover whether it shares any key space with its neighbors. To do this, the procedure may vary depending on whether the pair of nodes are from the within the group of the splitted area, between two groups of the splitted area or between the splitted hexagon and the other group. Each node broadcasts its group ID, B IDs, C IDs and column of G. Each node checks the IDs of every neighbor to see if any ID equals to one of its own.
Case (i). Within the group of the splitted cell.
If two neighbor nodes have the same group index, then either of them can derive a pairwise key by computing the dot product of its own row of matrix A and the column received from the other as shown in Fig. 4.

Generating keys within the group of the splitted cell.
Case (ii). Between the groups of the splitted cell.
If two neighbors have only one common matrix B1, then either of them can derive a pairwise key by computing the dot product of its row of that matrix B1 and the column from the other as in Fig. 5.

Generating keys between the groups of the splitted cell.
If two neighbors have more than one common matrix B1, then they select the same matrix from the shared ones and derive a pairwise key from this selected matrix B1. To share the key, they select the matrix whose index is small.
Case (iii). Between the splitted cell group and the other group.
As shown in Fig. 3, the shared key is established between the splitted group and the other group by the common matrix C1. Two neighbors have more than one common matrix C1, so they generate pairwise keys from the selected matrix whose index is the smallest. If no matched index is found, then two nodes are unable to communicate with each other.
If direct key establishment fails, two sensor nodes will have to start phase 3 to establish a pairwise key with the help of other sensors. To establish a pairwise key with node j, a sensor node i needs to find a path between itself and node j such that any two adjacent nodes in the path can establish a pairwise key directly. Then either node i or j initiates a request to establish a pairwise key with the other node through the intermediate nodes along the path. Then the path key is established through the intermediate node.
Performance Analysis
Connectivity Analysis
Connectivity is defined as the probability of any two nodes sharing a common key to form secure connection. Connectivity analysis depends on the number of nodes per unit area, i.e., node density and their transmission range. Each single node contributes to the connectivity of the entire network. If the transmission power of a node is increased it will typically achieve a higher transmission range and therefore reach more nodes via a direct link.
Let N be the number of nodes placed in the sensor field Sf. Pc denotes the connectivity of the sensor network, referred to as the probability that the deployed network is connected. Given a real number α we can derive an appropriate distance r for the desired Pc when N approaches infinity. Pc and r interact with each other via the parameter alpha [10].
The connectivity can be calculated using the equation


Figure 6 shows the connectivity analysis of hexagon based scheme based on transmission range with 10,000 nodes requiring Pc = 0.9999 and the transmission range as 24 m. From the plot, it is inferred that Pc = 0.9999 is achieved at the transmission range of 24 m.

Connectivity analysis of hexagon based scheme.
We propose cell splitting in hexagon so that the transmission range is reduced, and to achieve connectivity of 0.9999 and so that each node requires less number of neighbors than hexagon scheme. The transmission range is set as

High connectivity is achieved with a much shorter transmission range, i.e., at the transmission range of 12 m when cell splitting concept is applied to the hexagon, the area is splitted in such a way that the radius is half when compared to the existing hexagon. But in hexagon based scheme, high connectivity is achieved at a transmission range of 24 m and for the basic scheme it is 40 m. Thus, we can achieve a high connectivity with a shorter transmission in the proposed scheme.
We evaluate the resilience of a scheme against node capture by two metrics: local security and global security. Local security is defined as fraction of links compromised given some number of captured nodes within a grid. Global security is defined as fraction of links compromised given some number of captured nodes in the whole area of interest.
In hexagon deployment, if N is the number of nodes and Sf is the sensor field, each node has πr2q − 1 neighbors, where q = N/Sf is the node density over the sensor field. To evaluate the fraction of links compromised, it is necessary to know the average number of inter-group links formed by the node [10], denoted as



Figure 7 shows the security analysis of hexagon based scheme within one group. Almost 2% of links are compromised in the hexagon based scheme. The fraction of links compromised for the whole sensor field is n/2 times than that given in Eq. (7).


Security analysis of hexagon based scheme within one group.
Figure 8 shows the security analysis of hexagon based scheme in a sensor field. The analysis shows that the fraction of links compromised in a sensor field is n/2 times larger compared to the fraction of links compromised within one group.

Security analysis of hexagon based scheme in a sensor field.
In the cell splitted area, the radius is r/2, where r is the radius of a hexagon, so the number of neighbors each node has is denoted by π(r/2)2q − 1, where q = N/Sf is the node density over the sensor field. The node density is large at the centre, i.e., at the deployment point and lowest at the edges of the field. So the field is splitted at the centre of the hexagon.
To evaluate the fraction of links compromised, it is necessary to estimate the average number of inter-group links compromised. To find this, consider a stripped area and assume that a node containing a compromised row falls in to the strip shaped area. Let Lcomm denote the average number of inter group links compromised in a given area. The average number of inter group links formed by this node,


In hexagonal grids, a node containing 3 rows would affect 13 groups. But when the field is splitted based on the cell splitting concept only 7 groups are affected and form 14 common areas, i.e., 14 Lcomm inter-group links are compromised.
Each nodes has π(r/2)2q − 1 neighbors, hence there are totally N/2(π(r/2)2q − 1) links in the whole sensor field. Therefore, the fraction of links compromised within one group is
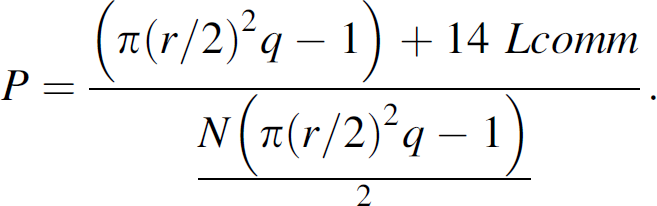
Figure 9 shows the security analysis of the proposed scheme within one group. Fraction of links compromised is very less. The fraction of links compromised for the whole sensor field is n/2 times than that given in Eq. (11),


Security analysis of the proposed scheme within one group.
Figure 10 shows the global security analysis of our proposed scheme in the whole sensor field. The analysis shows that the fraction of links compromised in a sensor field is n/2 times smaller compared to the fraction of links compromised within one group.
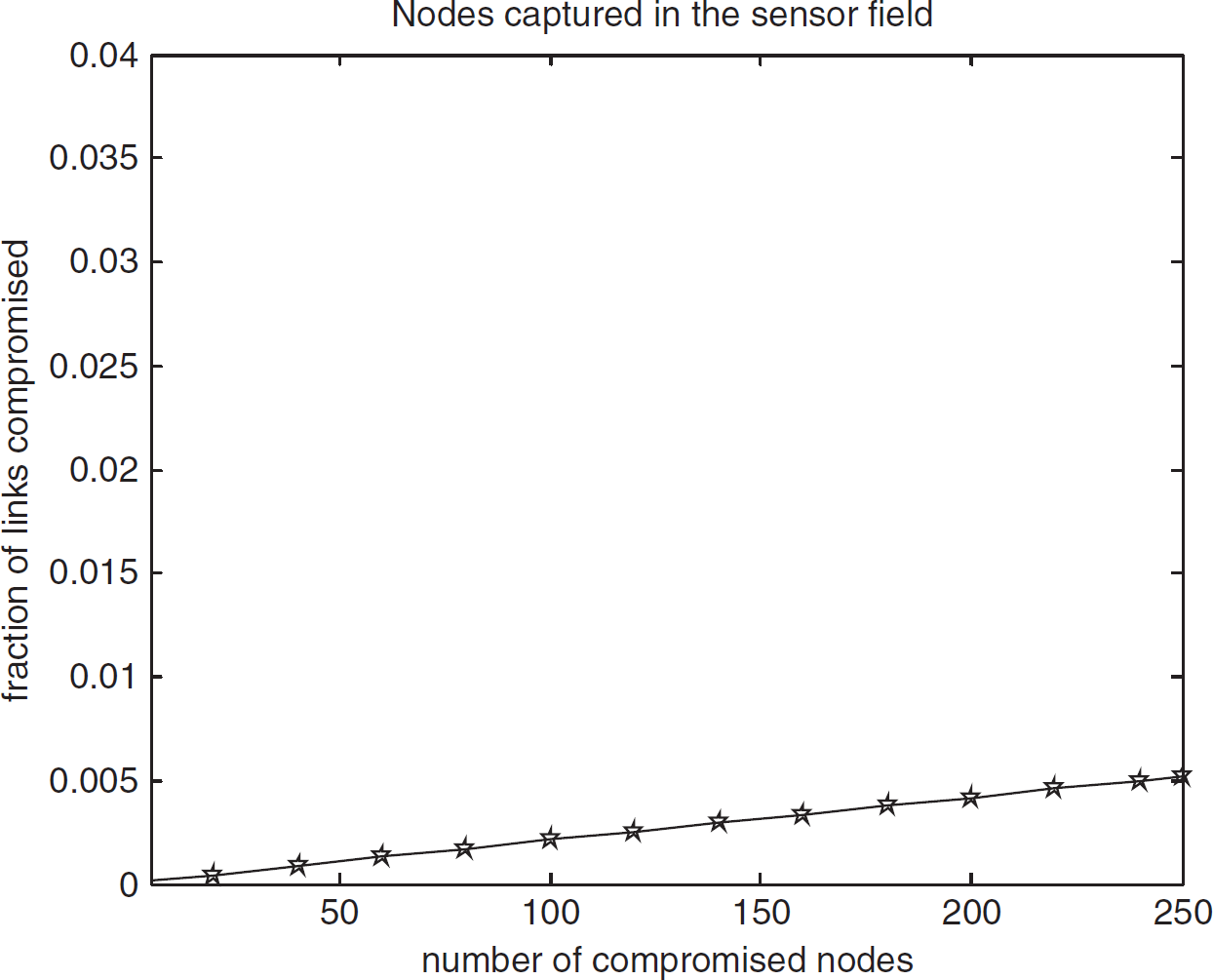
Security analysis of the proposed scheme in the sensor field.
Figure 11 illustrates the comparison of the resilience against node capture for DDHV scheme, EG scheme, the hexagon based scheme and the cell splitting. Figs. 11a and b gives the local security analysis and global security analysis respectively.

(a) Comparison of security analysis: Nodes captured within one group. (b) Comparison of security analysis: Nodes captured in the sensor field.
From global security analysis, it is inferred that almost 48% of links are compromised in EG scheme, 15% of links are compromised in DDHV scheme and 2% of links are compromised in hexagon based scheme. But when cell splitting is applied to the hexagon based scheme, only 0.53% of links are compromised. Local security analysis also show that our scheme has less fraction of links compromised compared to the other schemes. With cell splitting concept, we can achieve better security compared to the existing schemes.
In the sub-srid based key vector assignment scheme [6], Kalindi et al. introduce two strategies. In strategy 1, keys are placed at each position in the grid and then the nodes are placed at each position on the grid randomly. The keys are assigned to nodes as in the sub-grid scheme. In strategy 2, each grid position is first occupied by a node and in each mapping keys are placed randomly at grid positions. Here also, nodes get a unique set of keys in each mapping. This scheme requires as few as 25 keys to be stored in the sensor node to achieve a maximum connectivity of Pc = 0.9999. The scheme achieves higher connectivity with 40% lesser memory usage compared to the EG scheme. The security analysis of the scheme shows that security level of the strategy 1 is high when compared to strategy 2, because in strategy 1, keys are grouped and then assigned to nodes. Here, capture of nodes does not disclose a significant number of keys of all the nodes, whereas in strategy 2, the position of the node is fixed and the keys are placed on them. Therefore, capture of a single node under strategy 2 reveals keys of all its neighbors.
In our proposed scheme, a group based deployment model is assumed. In this model, the field of interest is divided into equal number of grids and the total numbers of nodes are divided into groups that are equal to the number of grids and deployed into the grids. The center of each grid is called deployment point, which is the desired location of the nodes of the corresponding group. Due to randomness, each group of nodes may spread into a small circle area around their deployment point. The closer to the deployment point, the more nodes reside in the location. The proposed scheme is evaluated in terms of connectivity analysis and security analysis. The schemes discussed in the introduction uses a
Conclusion
In this article, we presented a cell splitting concept to enhance the key predistribution scheme with deployment knowledge. With such scheme, the same connectivity is achieved with a smaller transmission range compared to the hexagon based scheme. More importantly, the networks resilience against node capture is substantially improved. Local security and global security analysis of the improved key predistribution scheme show that only 0.19% and 0.53% of links is compromised respectively. This implies the hexagon based scheme with cell splitting concept has less fraction of links compromised compared to the other schemes. We have shown these improvements using the simulation results.