
Abstract
In radio frequency identification (RFID) systems, the detection range and read rates will suffer from interference among high power reading devices. This problem grows severely and degrades system performance in dense RFID networks. Consequently, medium access protocols (MAC) protocols are needed for such networks to assess and provide access to the channel so that tags can be read accurately. In this paper, we investigate a suite of feasible power control schemes to ensure overall coverage area of the system while maintaining a desired read rate. The power control scheme and MAC protocol dynamically adjusts the RFID reader power output in response to the interference level seen during tag reading and acceptable signal-to-noise ratio (SNR). We present novel distributed adaptive power control (DAPC) and probabilistic power control (PPC) as two possible solutions. A suitable back off scheme is also added with DAPC to improve coverage. Both the methodology and implementation of the schemes are presented, simulated, compared, and discussed for further work.
Keywords
Introduction
The advent of radio frequency identification (RFID) technology has brought with it, increased visibility into the manufacturing process and industry. From supply chain logistics to enhanced shop floor control, this technology presents many opportunities for process improvement or re-engineering. The underlying principle of RFID technology is to obtain information from tags by using readers through radio frequency (RF) links. The RFID technology basics and current standards can be found at [1].
In passive RFID systems, tags harvest energy from the carrier signal which is obtained from the reader to power internal circuits. Moreover, passive tags do not initiate any communication but they only decode modulated command signals from the readers and respond accordingly through backscatter communication [2]. The nature of RF backscatter requires high power ouput at the reader and theoretically higher output power offers a farther detection range with a desirable bit error rate (BER). For 915 MHz ISM bands, the output power is limited to 1W according to [3]. When multiple readers are deployed in a working environment, signals from one reader may reach others and cause interference. This RFID interference problem was explained in [4] as the Reader Collision.
The work in [4] suggested that RFID frequency interference occurs when a signal transmitted from one reader reaches another and jams its ongoing communication with tags in range. Studies also show that, interrogation zones among readers need not overlap for frequency interference to occur, the reason being power radiated from one reader needs to be at the level of tag backscatter signal(µ W) [5] to cause interference when reaching others. For a desired coverage area, readers must be placed relatively close to one another forming a dense reader network. Consequently, frequency interference normally occurs which results in limited read range, inaccurate reads, and long reading intervals. Placement of readers to mimize the interference and maximize the read range is an open problem.
To date, frequency interference has been described as “collision” as in a yes or no case where a reader in the same channel at a certain distance causes another reader not to read any of its tags in its range. In fact, higher interference only implies that the read range is reduced significantly but not to zero. This result is mathematically given in Section 2. Previous attempts [6, 7] to solve this channel access problem are based on either spectral or temporal separation of readers. Colorwave [6] and “Listen before talk” implemented as per CEPT regulations [7] rely on time-based separation while frequency hopping spread spectrum (FHSS) implemented as per the FCC regulations [3] utilize multiple frequency channels. The former strategy is inefficient in terms of reader time and average read range while the latter is not universally permitted by regulations. The proposed work is specifically targeted for RFID networks to overcome these limitations.
In this paper, we propose two novel power control schemes which employ reader transmission power as the system control variable to achieve a desired read range and read rates. The degree of interference measured at each reader is used as a local feedback parameter to dynamically adjust its transmission power. With the same underlying concept, decentralized adaptive power control uses signal-to-noise ratio (SNR) to adapt power at discrete-time steps while probabilistic power control adapts the transmission power based on certain probability distribution. A Lyapunov-based approach is used to show the convergence of the proposed DAPC scheme. Simulation results demonstrate theoretical conclusions.
In terms of organization, the paper discusses the problem formulation in Section 2. Then the decentralized power control algorithms are presented in Sections 3 and 4. In Sections 5 and 6, implementation of the algorithms and simulation setups are detailed. Subsequently, the simulation results are discussed.
Problem Formulation
Frequency interference problem needs to be fully understood before a solution can be evolved. In this section, we present analysis of this problem and assumptions made.
Mathematical Relations
In a backscatter communication system, SNR must meet a required threshold Rrequired, which can be expressed as

where Eb is the energy per bit of the received signal in watts, N0 is the noise power in watts per Hertz, D is the bit rate in bits per second, and W is the radio channel bandwidth in Hertz. For a known modulation method and BER (bit-error-rate), Eb/N0 can be calculated. Hence, Rrequired can be selected based on desired a data rate and BER.
For any reader i, the following must hold for successful tag detection
where Pbs is the backscatter power from a tag, Ii is the interference at the tag backscatter frequency, and Ri is the SNR at a given reader.
In general, Pbs can be evaluated in terms of the reader transmission power Pi and tag distance r
i-t
. Other variables such as reader and tag antenna gains, modulation indexing and wavelength, derived in [8], can be considered as constants and simplified in (3) as K1. Then,

where q is environment dependent variable considering path loss, and gii represents the channel loss from reader i to tag and back. The communication channel between the reader and interrogated tag should be in a relatively short range, for this reason Rayleigh fading and Shadowing effects are not considered for the reader-tag link. Influence by reflection can also be considered as a constant merging into gii assuming the environment is relatively stable. Hence, Pbs can be evaluated using path loss alone and by ignoring other channel uncertainties. However, the channel uncertainites are considered during the calculation of interference since reader locations are relatively farther away compared to a reader and a tag and readers are power sources.
Interference caused by reader j at reader i is given as

where Pj is the transmission power of reader j, rij is the distance between the two readers, K2 represents all other constant properties, 100.1ζ corresponds to the effect of shadowing and X is a random variable with Rayleigh distribution [9] to account for Rayleigh fading loss in the channel between reader j and reader i. After simplification, gij represents the channel loss from reader j to reader i. Note that since the interference actually occurs at the tag backscatter sideband, only power at that particular frequency needs to be considered. This factor is also accounted for in K2 and gij.
Cumulative interference Ii at any given reader i is essentially the sum of interference introduced by all other readers plus the variance of the noise η

Given the transmission power and interference, the actual detection range of a reader is given by
Received SNR for a tag at a desired range rd can be calculated as

Merging (6) and (7), we can calculate the actual detection range ractual in terms of Rrd as
For analysis purposes, we assume any tag within such a range to be successfully detected by the reader due to BER specification. If a reader is completely isolated, meaning no interference, a maximum range rmax can be achieved by using at the maximum power Pmax of a given reader. In a practical application, it is not possible to expect this maximum range due to interference. It is important to note from (8) that the detection range and SNR are interchangeable and therefore, our proposed algorithms target for the required SNR. By viable power control both read rate and coverage can be achieved.
By substituting (3) and (4) into (2), note that the SNR as a time-varying function for a particular reader and it is given by

Notice that gii is constant for a particular reader-tag link by assuming that the tag is stationary. If the desired range for the reader is defined as rd which is less than rmax, then we can define the SNR for the backscatter signal from a tag placed at a distance rd to a reader as

where

Equation (10) provides the basic relationship between the SNR and the output power of all readers through interference experienced at a particular in the network. This relationship is used throughout this paper to derive the power control algorithms.
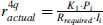
To better understand the problem, a simple two-reader model is considered first. Given two readers i and j spaced D(i, j) apart, each with the desired range R i_1 and R j_1 , respectively are shown in Fig. 1. Readers must provide transmission powers Pi and Pj to achieve their respective desired range without considering interference. However, due to the interference introduced by each other, the actual detection range in fact decreases to Ri_2 and Rj_2 respectively.
Two reader model.
As a result of not achieving the SNR at a desired detection range due to interference, readers must attempt to increase their transmission power. If both readers increase their powers greedily, they will eventually reach the maximum power without achieving the desired range due to increased interferences. Further, the SNR target is not met and as a result the tags are not read even those that are in range. One could solve this problem by operating them in mutually exclusive timeslots. However, as the number of readers increase, this strategy severely degrades each reader's average read time and detection range and eventually increases reading intervals.
A more appropriate solution is to balance the transmission power between the two readers in order to reach the equilibrium where multiple readers can achieve their respective read range. In the above model, if reader i transmits at Pmax and reader j is off, a read range greater than the targeted value of Ri_1 can be achieved. On the other hand, there exists a power level at which reader j can transmit and still allow i to achieve read range Ri_1. This process can be applied in reverse to enable reader j to achieve its targeted range. Under such circumstances, the average read range of both readers is improved over the typical on and off cycle. Such a yielding strategy is required in dense reader networks where desired range may not be achieved by all the readers simultaneously. The effect of this improvement will be significant in dense networks due to the strategy. The next section details such a decentralized strategy.
In this paper, two schemes of distributed power control are introduced—adaptive power control (DAPC) and probabilistic power control (PPC). DAPC involves systematic power updates based on local interference measurements at each reader. It also uses embedded channel prediction to account for the time-varying fading channel state for the next cycle. In Section 3, we analytically show that the proposed DAPC scheme will converge to any target SNR value in the presence of channel uncertainties. For dense networks where the target SNR can not be reached by all readers simultaneously, an additional selective back-off method is incorporated besides power updates introducing a degree of yielding to ensure that all readers achieve their desired range.
By contrast, in the PPC scheme, a probability distribution is specified for each reader to select output power from. Statistical distribution for the desired read range can be specified as the target. To achieve the target, the output power distribution on each reader is altered based on interference measurements. The relationship between the two distributions is analytically derived in Section 4.
Standards
Implementing FHSS on readers has been explored in the past as a solution to the interference problem. While FHSS reduces the probablity of interference, it is not a universal solution because of the differing spectral regulations over the world. In this proposed work, frequency hopping is not considered. New standards [10] have been designed in dense reader networks by spectrally seperating reader and tag modulation frequencies. However, subject to the Transmit Mask specifications and hardware implementations, substantial interference will still exist at the sideband frequencies of a tag in a highly dense reader network. The proposed work is not dependent upon any existing RFID standards or implementations and can be easily adapted to improve the performances of RFID reader networks.
Distributed Adaptive Power Control
Distributed power control (DPC) protocols have been extensively studied in the field of wireless communication, including in ad-hoc networks [14] and cellular networks [12]. Conceptually, power control in a RFID reader network is similar to these protocols. However, there are several fundamental differences between them due to the unique nature of the communication interface and RFID application. Moreover, a tag is not smart compared to a cell phone or a sensor node and therefore such schemes have to be modified for RFID applications.
First, the main goal of DPC in wireless communication is to conserve energy while maintaining the desired quality of service (QoS) requirements. In [11–14], the authors propose different power updating schemes in order to maintain a target SNR threshold for successful communication. By contrast, the work proposed for RFID systems is to reduce the interference introduced by others while maintaining read range requirements at each reader thereby achieving an optimal coverage for all readers and read rates. Second, DPC for ad-hoc and cellular networks requires a feedback signal between the transmitter and the receiver. In RFID reader networks, the reader acts both as a transmitter and receiver. Hence, the feedback is internal to the reader and does not result in any communication overhead. Thirdly, in contrast to low power wireless networks run on battery power, RFID readers in dense networks may not achieve the target SNR even at maximum power owing to the high levels of interference. Finally, in contrast with a connection oriented network where each node transmits only when it is needed most RFID readers are required to be always on and transmitting in order to read the tags. Therefore, it is more difficult in distributing the channel access among all readers.
The proposed DAPC algorithm consists of two building blocks—adaptive power update and selective back-off. The goal of the adaptive power update is to achieve required SNR with an appropriate output power by correctly estimating the interference and any channel uncertainties. In dense networks, selective back-off forces high power readers to yield so that other readers can achieve required SNR. We now discuss these two building blocks of DAPC in depth.
Power Update Scheme
The development and the performance of DAPC are now discussed demonstrated analytically. Differentiating the SNR (10) since the channel interference follows the time-varying nature of the channel, we get

where R'i-rd(t), P′i(t) and I′i(t) are the derivatives of Ri-rd(t), Pi(t), and Ii(t) respectively.
Applying Euler's formula, x′(t) can be expressed as

After the transformation, equation (13) can be expressed as

where


and

with the inclusion of noise, equation (14) is written as

where ω(l) is the zero mean stationary stochastic channel noise with ri(l) is its coefficient.
From (18), we can obtain the SNR at time instant l + 1 as a function of channel variation from time instant l to l + 1. The difficulty in designing the DAPC is that channel variation is not known beforehand. Therefore α must be estimated for calculating the feedback control. Now define yi(k) = Ri-rd (k), then equation (18) can be expressed as

Since αi, ri are unknown, equation (19) can be transformed into

where

where

where
From (22), it is clear that the closed-loop SNR error system is driven by channel estimation error. If the channel uncertainties are properly estimated, then SNR estimation error tends to be zero, therefore the actual SNR approaches the target value. In the presence of error in estimation, only boundedness of error in SNR can be shown. Given the closed-loop feedback control and error system, we can now advance to the channel estimation algorithms.
Consider now the closed-loop SNR error system with channel estimation error, ∊(l), as

where ∊(l) is the error in estimation which is considered bounded above
Theorem 1. Given the DPC scheme above with channel uncertainties, if the feedback from the DPC scheme is selected as (21), then the mean channel estimation error along with the mean SNR error converges to zero asymptotically, if the parameter updates are taken as

where ∊(l) is the error in estimation which is considered bounded above



where

and σ is the adaptation gain.
Note: The parameters σ, η, δ are dependent upon the desired SNR value with time.
Proof. Select a Lyapunov function candidate

Use the channel estimation error (23) and parameter tuning mechanism (24) to obtain

where

and

Completing the squares for

where

On the other hand, completing the squares for ‖ei(l)‖ in (30) results in E(ΔJ) ≤ 0 as long as the conditions (25-27) are satisfied and

where

and
In general E(ΔJ) ≤ 0 in a compact set as long as (25) and (27) are satisfied and either (33) or (34) holds. According to the standard Lyapunov extension theorem [15], this demonstrates that the tracking error and the error in weight estimates are bounded without the need for any PE condition on the inputs.
Remarks
In a dense reader environment, it is inconceivable that all readers are able to achieve their target SNR together due to severe congestion which affects both read rates and coverage. These readers will eventually reach maximum power as a result of the adaptive power update. This demands a time-based yielding strategy of some readers to allow others to achieve their target SNR.
Whenever the reader finds the target SNR is not achievable at maximum power, meaning the interference level is too high in the network, it should back-off to a low output power for a period of time. Since interference is a locally experienced phenomenon, multiple readers will face this situation and they will all be forced to back off. The rapid reduction of power will result in significant improvement of SNR at other readers. After waiting for the back-off period, a reader will return to normal operation and attempt to achieve the target SNR. The process is repeated for every reader in the network. To fairly distribute the channel access among all congested readers, certain quality measurements must be ensured for all readers in the back off scheme. The selective back-off scheme uses the percentage of time a reader has achieved desired range as the quality control parameter to ensure the fairness.
After backing off, each reader must wait for a time duration τ
w
. In order to show the illustrate the effect of back off, τ
w
is defined as a logarithm function of the percentage of time ρ a reader has attained the required SNR. A neglected reader will exit the back-off mode quickly and attain the required SNR while other readers in the vicinity fall back. The calculation of τ
w
is given by

Using the above equation, a reader with ρ equals 10% will wait for 10 time intervals while the waiting time for ρ of 100% equals 20. A plot of waiting time τ w versus ρ is presented in Fig. 2.
Selective back-off function plot.
The back-off policy will cause negative changes in interference, and hence does not adversely affect the performance of the adaptive power update. A detailed pseudocode for implementing selective back-off is given below in Table 1.
Selective Back-Off Pseudocode

DAPC can be easily implemented at the MAC layer of the RFID reader and MAC implementation is not covered in detail in this paper. The algorithm requires two parameters to be known initially. These are the desired range rd, and required SNR Rrequired.
Proposed DAPC can be seen as a feedback between the transmitter and receiver units of a reader. A block diagram of the implementation is shown in Fig. 3. The detailed description of the algorithm implementation is presented next.

Block diagram for DAPC implementation.
Power update block at the receiver unit of a reader obtains sensed interference I(l).
In the power update block, based on rd, Rrequired, and current power P(l), the current SNR Ri-rd(l) is calculated.
Ri-rd(l) is compared to Rrequired, and percentage of time achieving required SNR, ρ is calculated and recorded.
Based on equation (24), the channel is estimated for the next time step l + 1, and the power for P(l + 1) is also calculated using the feedback control (21).
P(l + 1) is then limited to maximum power Pmax, if the P(l + 1) greater than Pmax, the selective back-off scheme is triggered, otherwise P(l + 1) is used as the output power for the next cycle.
The selective back-off block follows the algorithm provided in the above subsection and restricts the final output power for the next cycle.
Simulation and results of the above implementation are discussed in Section V and Section VI respectively along with those of PPC. Next the PPC is discussed.
The idea of probabilistic power control comes from simple TDM algorithms. If a reader is assigned a time slot to transmit in full power while others are turned off, it will achieve its maximum range. A round robin assignment of time slots can assure that all readers operate with no interference. However, this is inefficient in terms of average read range, reader utilization, and waiting periods. It is obvious that more than one reader can operate in the same time slot but at different power levels to accomplish better overall read range.
If the power levels at all readers change in each time slot following certain distribution, over time, every reader will be able to achieve its peak range while maintaining a good average.
For a distributed solution, this would involve setting a probability distribution for power to be selected for each time step. Such a distribution would need to be adapted based on the density and other parameters of the reader network.
Power Distribution
Equation (9) states that the read range of a particular reader is dependent on its transmission power and the interference experienced which is a function of powers of all other readers. If reader powers follow certain probability distribution, the distribution of read ranges for each reader is a function of these power distributions.

where F(ri) is the cumulative density function of read range of reader i, and F(Pi) is the cumulative power density function of reader i. Performance metrics including mean read range µ
r
and percentage of time ρ achieving the desired range rd characterized the read range distribution F(ri).

To achieve targeted characteristics on the read range distribution, we need to modify the power distribution freely. Beta distribution, demonstrated in Fig. 4, is specifically chosen for this reason; by specifying the shape variables α and β, one can change the cumulative density function in the domain from 0 to 1 (0% to 100% power). By changing these two parameters, we can control the power distribution and thus attempt to achieve the desired targets on the read range distribution in (39). Power using Beta distribution can be represented as


The cumulative density function of read range.
Shown in Fig. 4, Beta(0.1,0.1) renders 30% probability in selecting either high or low power. On an average, a third of the total readers will not operate in each timeslot, and therefore the interference levels will be reduced. Such a distribution is expected to perform well in dense networks since it works similar to a time slotting method. For sparser networks where the target SNR is achievable for all readers, power distribution Beta(0.1,0.1) will degrade the performance since readers will be off 30% of the time. Meanwhile, distribution generated by Beta(2,2) will result in higher probability being in the medium power range and it will achieve better results since higher output power can overcome the interference produced in sparser networks. It is important to notice that dense RFID networks involve 30 to 40 readers while sparse networks may involve 5 to 10 readers unlike in wireless ad hoc and sensor networks where dense networks may involve several hundred to thousand sensor nodes.
Equation (39) represents the relationship between the cumulative density function of the read range and the output power of all readers. However, in a distributed implementation, operation parameters such as the power distribution and location of a reader are not known to the other readers. Hence, these parameters have to be reflected in a measurable quantity; Equation (5) provides such a representative quantity in the form of interference which leads to (42) as

Substituting (40) and (41) into (42),

Transforming (43), we can represent α and β in terms of µ
r
, ρ, and F(Ii) as

where F(Ii), the cumulative density function of interference, can be statistically evaluated by observing the interference level at each reader over time. It can also be interpreted as the local density around the reader.
The function represented by (43) involves joint distributions of multiple random variables and it is complex and difficult to extract. However, it is easy to obtain numerical data sets of the above function from simulation. Such data sets can be used potentially to train a neural network which could provide a model of the above function. In this paper, we do not attempt to provide the interference based adaptive distribution tuning scheme for the PPC. We only implement PPC using fixed power distributions for all scenarios to observe the overall performance patterns and to understand the differences between the DAPC and PPC. The two distributions, Beta(0.1,0.1) and Beta(2,2) used in Fig. 4 are chosen for the simulation and compared for performance evaluation.
In terms of implementation, PPC only requires a power control block which selects output power based on predefined probability distributions. However, a more complex model of PPC can be generated provided the relationship in (44) can be obtained. This PPC requires interference measurement and dynamically adjusts the power distribution based on interference to maximize µ r and ρ.
The simulation environment is set up in MATLAB. Full model of DAPC and PPC are implemented for comparison. Both algorithms are tested under the same configuration.
Reader Design
Reader power is implemented as a floating point number varying from 0 to 30dBm (1W) as per FCC regulation. For error-free detection, the reader should maintain a target SNR of 14 (~11dB). Other system constants are designed so that the maximum read range of a reader in isolated environment is 3 meters. Interference experienced at any reader is calculated based on a matrix consisting of power and positions of all other readers plus the channel variation gij. A desired range of 2 meters is specified based on the worst case analysis.
For proposed DAPC, power update parameters Kv and σ are both set to 0.001. For proposed PPC, both Beta(0.1,0.1) and Beta(2,2) are implemented.
Simulation Parameters
For both models, random topologies are generated in order to emulate denser network with a suitable number of readers. The RFID network with suitable density for a given scenario is created by placing the readers with the minimum distance between them and the maximum area under test. The minimum distance between any two readers is varied from 4 meters to 14 meters and the maximum size of the coordinate is adjusted accordingly. The number of readers is changed from 5 to 60 for creating denser network and to test the scalability of the proposed schemes. Each simulation scenario is executed for 10000 iterations.
Evaluation Metrics
To demonstrate the typical performance of the reader network, the cumulative range distribution of a reader can be plotted. In Fig. 5, the cumulative density function F(x) of read range x for a reader using DAPC is plotted. From this plot, we can observe the minimum and maximum detection range as well as the percentile of attaining certain ranges.

The cumulative density function of the read range.
To evaluate the performances of the proposed algorithms, the following metrics: average read range, percentage of time attaining desired range, average output power, and average interference experienced are evaluated across all readers for each scenario and simulation results are given.
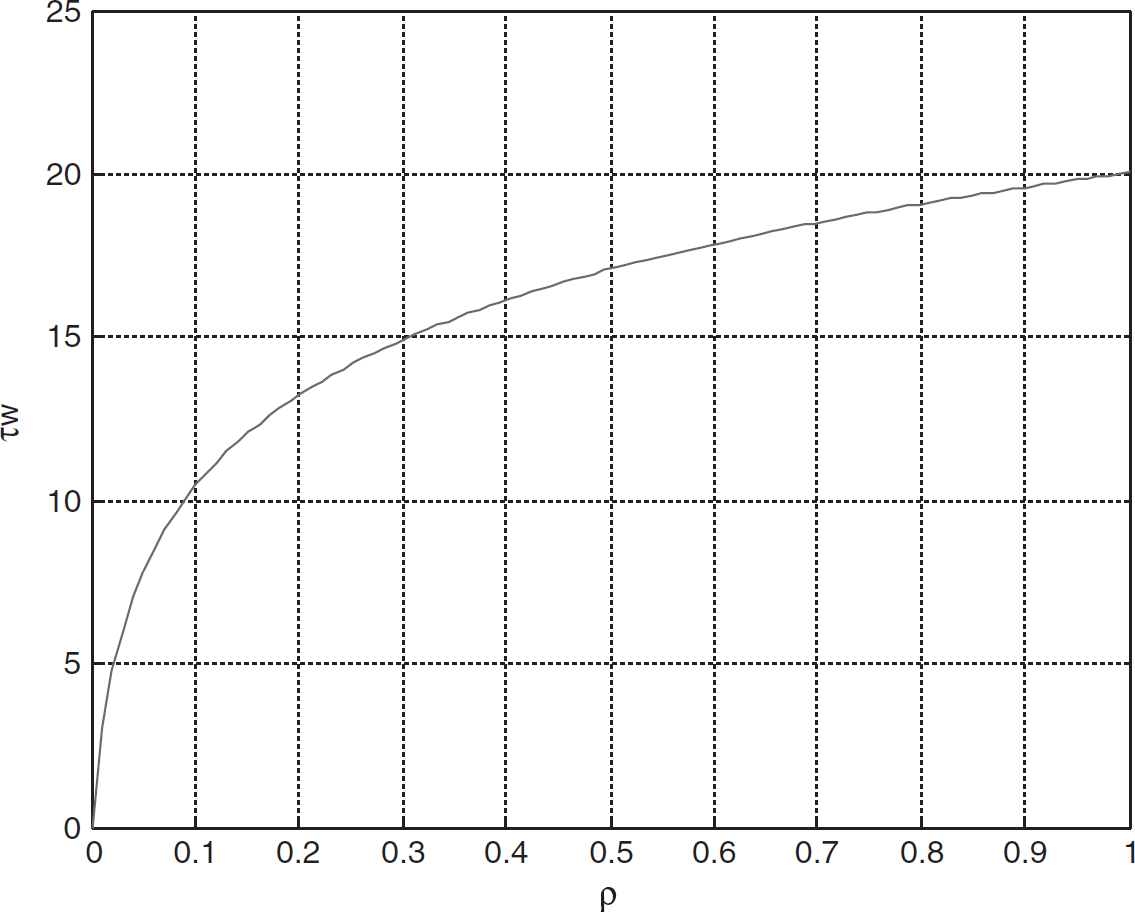
In Fig. 6, the output power, interference level, and detection range at a particular reader are plotted versus time for DAPC in a dense network. It is seen that DAPC attempts to achieve the desired range by increasing power; however, the interference level is too high and therefore the reader reaches maximum power and enters the selective back-off scheme. It is also observed that as the reader backs off to low power value, the interference level increases meaning that other readers are taking the advantage and accessing the channel. This plot also demonstrates the changes in back-off time corresponding to the desired range of achievement, for example the time interval 12 to 24 and 28 to 37 sec.
Output power, interferences and detection range vs. time in seconds.
The analysis of performances in sparse networks is discussed first. With the minimum distance of 9 meters between any two readers, the average percentage of time ρ attaining desire range across all readers is presented in Fig. 7. Note that each reader has a maximum detection range of 3 meters without interference and the desired range is set to 2 meters in the presence of multiple readers. DAPC is observed to have superior performances over the two PPC algorithms for this sparse network. DAPC converges to 100% desired range achievement with the appropriate parameter estimation and closed-loop feedback control described in Section 3. The results justify the theoretical conclusions. It is also shown that Beta(2,2) performs better than Beta(0.1,0.1) in terms of ρ. With Beta(2,2) distribution, every reader will be on and transmitting at medium power most of the time. With sparse networks and small interferences, the medium power overcomes the interference produced and therefore achieving the desired range. In contrast, Beta(0.1,0.1) has a 30% probability being off, therefore the probability of attaining the desired range will be low.

Number of readers vs. percentage of time achieving desired range.
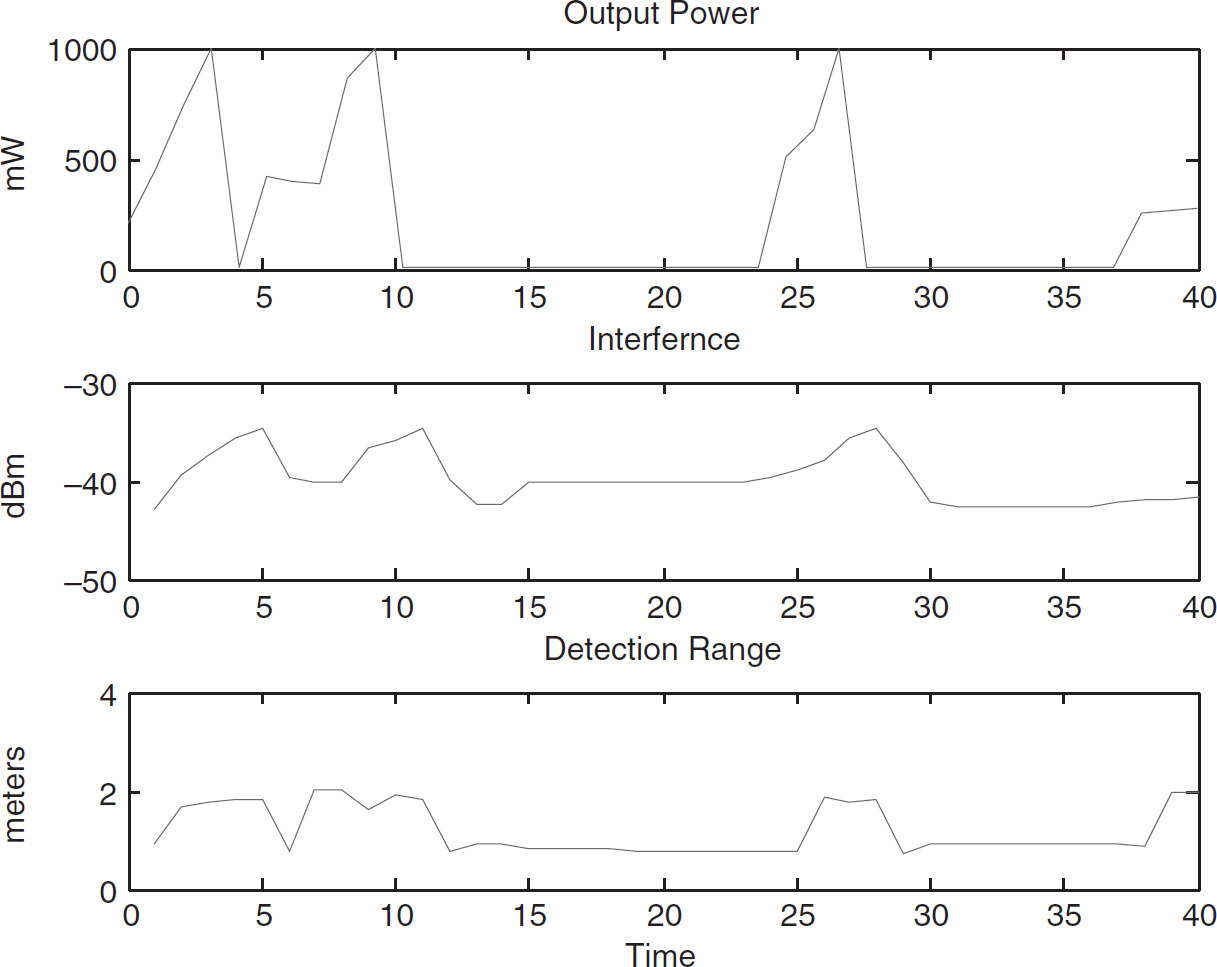
In Fig. 8, considering the average detection range for the same scenario, DAPC converges to the 2 meters desired range and outperforms both PPC algorithms. We can also observe the average power level used for each algorithm in Fig. 9. Since the mean for both Beta(2,2) and Beta(0.1,0.1) is 0.5, the average reader output power lays at 500 mW which is half of the maximum power. Meanwhile, DAPC is able to dynamically adjust its output power to find the optimal level for which the desired range can be achieved as the size of the network varies.
Number of readers vs. average detection range in meters.

Number of readers vs. Average output power per reader.
The performance of the power control schemes in denser networks is now analyzed. For a network with a minimum distance of 6 meters, the desired range is not attainable by all readers since the transmission power is not able to overcome the interference forcing the yielding strategy of each algorithm to test. The detection range and percentile versus the number of readers are presented in Fig. 10 and Fig. 11, respectively. As the number of readers increases, the overall interference in the network will also increase. Consequently, the percentage of time ρ a reader attains its desired range will drop as shown in Fig. 10. It is observed that PPC with Beta(0.1,0.1) offers the best performances in terms of ρ. This is because on average 30% of the readers will be switched off for each time interval while for the other 30% they transmit at full power. Hence, readers in full power have great probability in attaining the desired range whereas the average detection range is sacrificed for this achievement. The relatively poor performance in the average detection range compared to DPC and PPC Beta(2,2) can be observed in Fig. 11.

Number of readers vs. percentage of time achieving desired range.
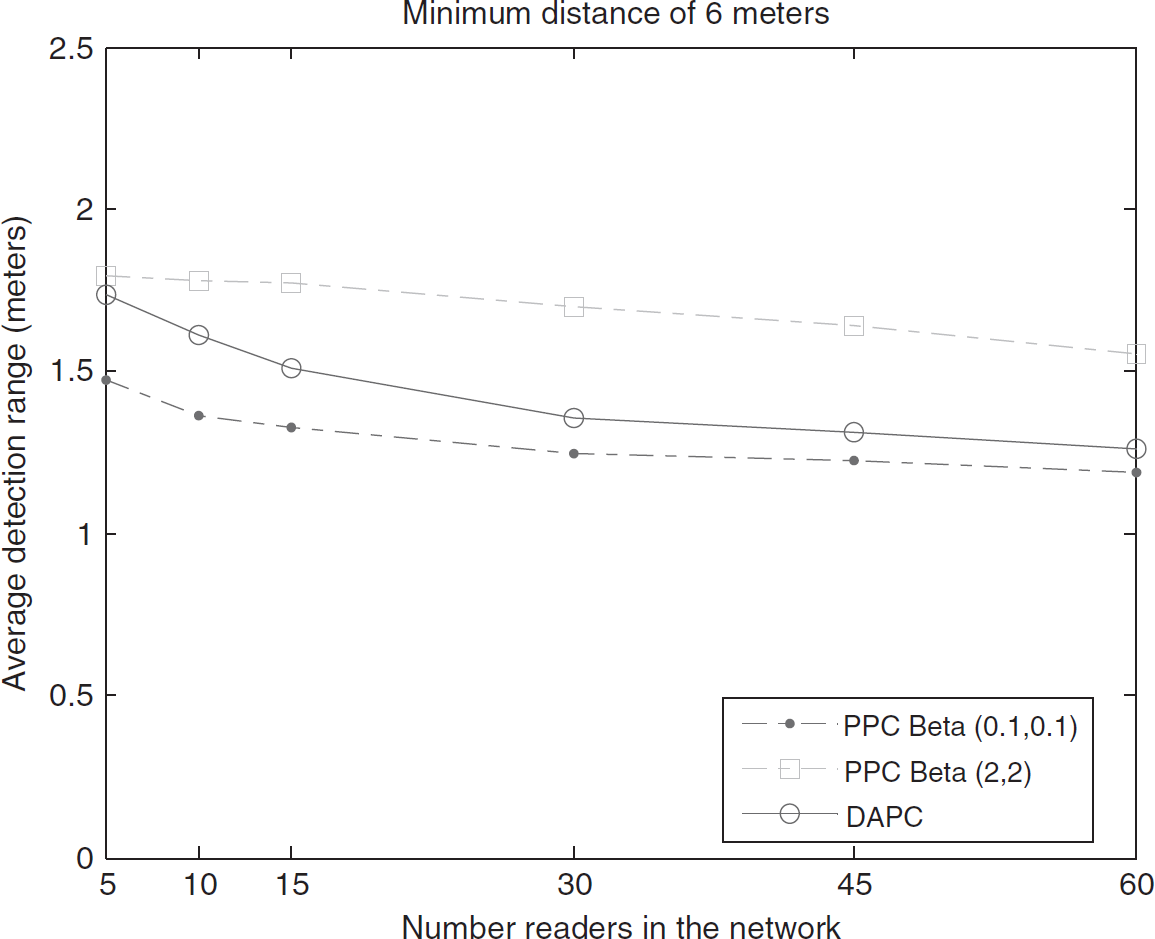
Number of readers vs. average detection range.
While the percentage of time achieving a target range is low for Beta(2,2) it provides the best average detection range out of all three algorithms. DAPC with a selective back-off scheme finds a balance between the two evaluation metrics. These show that there is a tradeoff between the percentage time achieving the target range and the average detection range achieved.
The average detection range and percentile plots can also be produced by fixing the number of readers and varying the minimum distance between any two readers. Shown in Fig. 12 and Fig. 13, DAPC is seen to converge as the minimum distance between any two readers decreases which again verify the theoretical conclusions for the power update scheme. With the same explanation discussed above, PPC with Beta(0.1,0.1) performs better in achieving the desired range where as Beta(2,2) gives a better average detection range.

Minimum distance vs percentage of time achieving the target range.

Minimum distance vs average detection range.
Two algorithms for RFID reader read range and interference management based on distributed power control are explored and analyzed. Both algorithms can be implemented as power control MAC protocols for MATLAB based RFID reader network simulation. DAPC is seen to converge at a fast rate to the required SNR if it is achievable within power limitations. A selective back-off algorithm in DAPC enhances the channel utilization in denser networks. PPC is not fully implemented to tune in with the network density; however, it still shows advantages in scalability and fairness of channel assessment. Furthermore, implementation details for both algorithms are discussed.
In this paper, we have provided a novel interpretation of the reader collision problem which can be applied to other similar RF systems also. We have demonstrated that high power RFID network suffers from severe interferences and causes problem on other lower power RF devices. These problems may not be resolved easily at the RF communication level, and therefore, two power control algorithms, DAPC and PPC are introduced. Further work on DAPC would involve automatically tuning the selective back-off implementations based on interference and quality measurements. Further work on PPC would concentrate on developing a method to internally adapt the power distribution based on interference measurements to achieve specified statistical goals for the read range.