
Abstract
We propose a method for managing the spontaneous organization of sensor activity in ad hoc wireless sensor systems. The wireless sensors exchange messages to coordinate responses to requests for sensing data, and to control the fraction of sensors which are active. This method can be used to manage a variety of sensor activities. In particular, it can be used for reducing the power consumption by battery operated devices when only low resolution sensing is required, thus increasing their operation lifetimes.
Keywords
Introduction
Recent developments in microelectronics have made possible the development of small, low power wireless sensor devices with the ability to handle sophisticated communication protocols. There is a growing interest in applications of the devices in distributed sensor networks, for example, in environmental monitoring, surveillance systems, and in-building control. However, these systems require the development of new control and management methods. Key issues distinguishing wireless sensor networks from conventional computer networks are the large numbers of devices, unreliable operating conditions, and severe constraints on operating resources, as well as functional architectures with an emphasis on sensing and collecting data rather than processing and using data [1]. Moreover, wireless sensor devices may have limited battery power sources. Such sensor systems need to act somewhat like living systems—they have to integrate sensing, communication and self-maintenance functions under highly variable conditions, and to make dynamic trade-offs between survival and performance. They should be able to operate with minimal external control using self-organizing mechanisms which support robust operation in the presence of large and varying numbers of other nodes [2]–[5].
The use of self-organizing methods for coordination of activity in wireless networks has progressed over recent years. The standard protocol for wireless LAN, IEEE 802.11 [6], has an ad hoc mode (DCF: Distributed Coordination Function) which allows devices to spontaneously form cells even when there is no infrastructure access point to provide central coordination of communications. The PAN protocols Bluetooth and ZigBee also support spontaneous network formation to a certain extent. Routing protocols such as being considered in the IETF MANET (Mobile Ad hoc Networks) Working Group support the spontaneous formation of routing in the absence of centralized routing control. A number of recent works have also proposed methods for self-organized coordination of nodes in wireless sensor networks [3]–[5].
Our aim is to extend self-organization to higher-level sensing system functions, including interaction with users. In this paper we consider wireless sensors which respond on demand to requests for sensing data. We propose a protocol which allows the self-organization of sensor activity to be controlled by the user in such a way that the trade-off between the sensor capacity and operation lifetime can be matched to the sensing needs. In order to create an appropriate management protocol, we chose to build on a proven robust protocol: the management scheme used in the ad hoc mode of the 802.11 medium access protocol. This is used to manage the formation and maintenance of cells, and synchronization and power management through sleep cycles. We have built on this method and extended it to management of more general forms of activity in ad hoc wireless sensor systems.
In this paper, we first give an overview of our system design. Then we provide a more detailed description of specific features. We also describe a prototype system that has been developed to test the proposed protocol, and discuss issues of stability and performance.
System Overview
We consider a distributed system of wireless sensor nodes, typically distributed in a more or less random way to cover a certain spatial area (Fig. 1). The nodes operate on demand to collect and transmit sensing data. We assume the requests for sensing data come from a command node, shown at the center of Fig. 1. The command node could be a mobile node, such as a PDA held by a human operator. Our system design relates to how the sensors respond to requests for sensing activity from the command node. The basic idea is that depending on the demands of the user, it may not be necessary for all the nodes to be active at the same time. For example, if the nodes are temperature sensors, and the user requires only a rough sample, only a fraction of the nodes need to be active. If more nodes are active, more complete sensing data can be acquired, but typically at a cost. The cost could be shorter operating lifetimes of the devices if they are battery operated. The cost could be communication congestion if the communication bandwidth is limited. Or the cost could be excessive processing load if the processing power of the command node is limited.

Typical distribution of sensor devices and a command node. Sensor devices are randomly distributed around a command node which issues requests and collects data from the sensors. Circle shows nominal range for wireless communications with the command node
In our design, we take a lesson from the operation of the ad hoc mode of the 802.11 MAC protocol [6]. According to the Distributed Coordination Function of 802.11, in each beacon interval only one node, the node which chooses the shortest random wait time, transmits a beacon and stays awake. The other nodes which hear the beacon transmission by the first node cancel their own beacon transmission and go to sleep until the next beacon window, when all nodes wake up again. We adopt this mechanism to coordinate not only the wireless medium access activity, but also the sensing activity of the nodes. A summary of the protocol is given in the next section.
In this section we describe the protocol which is used to coordinate the wireless sensor devices. The nodes use a beacon mechanism similar to that of the 802.11 protocol to share timing and cell-ID information, and to manage the switching between active and inactive states.
Figure 2 shows the basic timing diagram. The devices cycle between awake and sleep states. Exchanges of messages between devices is done when all the devices are awake. When the command node broadcasts a request for sensing activity, typically only a fraction of the nodes are active and hear the command. If it is necessary to get data from the other nodes, the awake nodes buffer the requests and relay the requests to the other nodes in the next all-awake window.

Timing Diagram (see text for explanation)
A key difference from the 802.11 mechanism is that more than one node can be active, and that the number of active devices can be controlled by the user. The number of active devices can be changed via an activity command-parameter K, included with the request for sensing activity. The nodes refer to the value of this activity parameter when they decide whether to be active. The decision whether to be active can be made in two ways according to the value of a command parameter J. In each case, each node chooses a random delay to wait before sending a beacon.
J = 0: The sensors count the number of other transmissions heard while they are waiting to transmit and if the count reaches the value of the activity parameter K, then they cancel their own transmission. A node which does not transmit a beacon switches to sleep state.
J = 1: The decision to transmit a beacon and stay awake is made randomly with the probability K%.
In this way, active nodes are elected for the next cycle through the beacon transmission process. All nodes stay awake if there are requests pending to be relayed. Otherwise, if a node sends a beacon, it becomes active for the next cycle, and if a node fails to send a beacon, it goes to sleep for the next cycle. Figure 3 shows the decision flowchart.

Flowchart for decisions during all-awake window
The key parameters of the protocol as follows:
T: Beacon period D: All-awake window duration W: Number of time-slots for random wait J, K: Activity mode and activity parameter.
These values are typically set at the command node and included in the request which is broadcast to the sensor nodes and in the beacons transmitted by the sensor nodes.
In this section we describe an experimental prototype sensor system which has been developed to test the proposed activity management protocol. As a typical application, we consider wireless control and monitoring of temperature sensors. The sensors are small battery operated sensor devices. The command nodes are portable PDA, such as carried by building and site supervision staff. A typical high-resolution sensing application scenario requires nodes placed with spacing of a few meters, with typically 30–40 nodes within range of a single mobile user PDA.
Figure 4 shows examples of sensor devices and command node PDA used in the protocol system. The user issues commands to control sensing activity by clicking buttons in the PDA user interface. Data collected from the sensors in the vicinity is shown on the display. Communication with the command-node PDA is achieved by attaching one of the wireless devices to the PDA via its serial port.

Prototype of wireless sensor system. UD devices (Oki Electric) are used as sensor nodes and a PDA is used as a command node which issues requests for sensing data
The wireless sensor devices were provided by Oki Electric, and are known as Ubiquitous Devices (UD). The devices are battery operated with integrated temperature sensors, MPU and wireless communication modules. The MPU on the device is re-programmable, allowing testing of various implementations of protocol for sensor and command nodes. The version of UD that we used, UD-Version 3, operates on a single 3V battery and transmits data at 19kbps on 315MHz radio over typical range of 5∼20m. The media-access is based on carrier sensing. If carrier sensing indicates the channel is busy, the node chooses a random time to wait before transmitting. For power economy, a node does not continue carrier sensing while it waits to transmit.
The command node PDA broadcasts a command packet which includes parameters which specify how nodes should sample and report temperature data. For minimal sampling, it is sufficient for only one node to be active. When a more detailed spatial map of temperature is needed, data is collected from as many sensors as possible. The ratio of sensor activity is controlled by the value of the activity parameter K specified in the broadcast request. Typical values of parameters for the activity control protocol are as follows: Beacon period T = 5 secs, Awake time D = 500 msec, slots in all-awake window W = 32.
A primary feature of this system is the dependence of performance characteristics on the activity parameter. In particular, the lifetime and the sensing capacity are key performance characteristics.
The next figure, Fig. 5, shows the dependence of the system lifetime and sensing capacity on activity parameter. The system lifetime is the time when all nodes are expected to expire due to battery exhaustion. As activity parameter K increases, the system lifetime decreases, roughly as 1/K. Sensing rate increases with K, initially linearly for small K, and saturating at higher values.
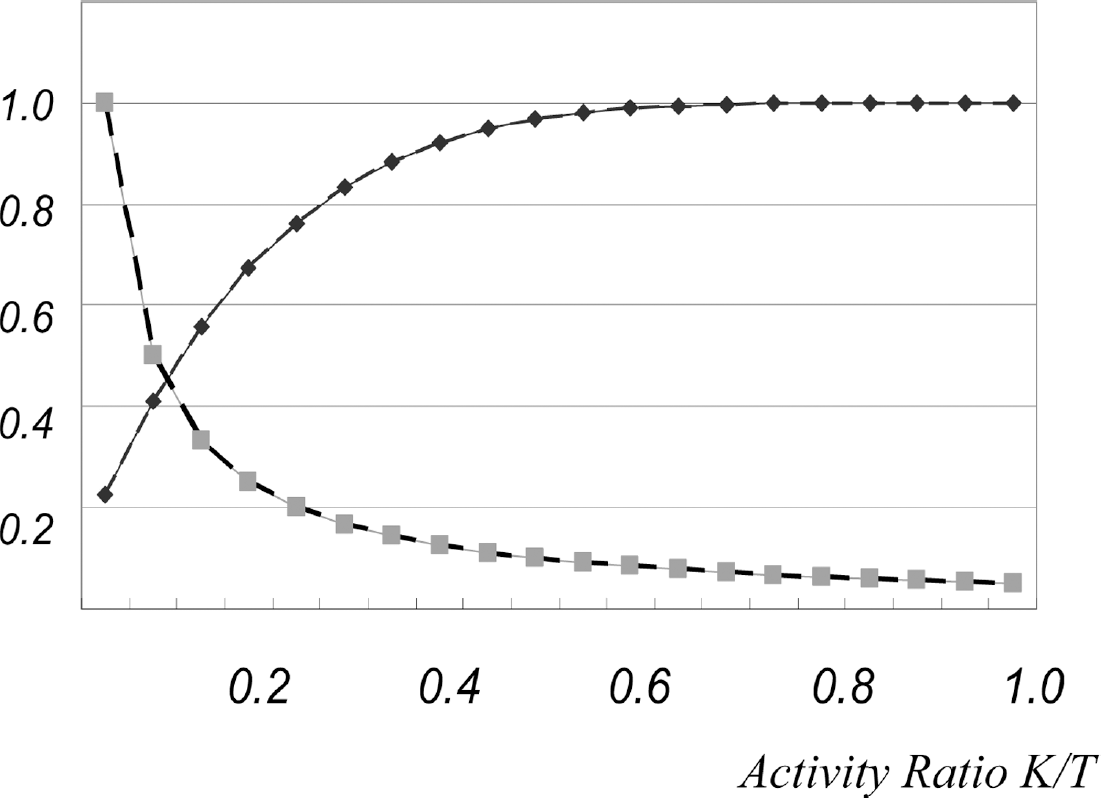
Dependence of lifetime and sensing capacity on activity ratio. Decrease of lifetime (squares), and increase of sensing capacity (diamonds), with increasing steady-state activity ratio K/T, shows trade-off between them. K: activity parameter T: beacon period Lifetime and sensing capacity are shown in normalized units
A feature of our protocol is that the value K is a parameter which can be included in the request to the sensors. Typically, a low value of K can be used as default. Larger values can be commanded as needed to increase the sensing capacity and resolution of the system.
A second major issue for this system is the stability. As is the case with the 802.11 beacon system, the system is stable when the node distribution is compact, so all nodes can hear each other's beacon transmissions. When nodes are spread out as in Fig. 1, the dynamical behavior can be more complicated, resulting in long transient times for stabilization of activity [7].
The synchronization time for our wireless sensor system can be characterized using the prototypical case shown in Fig. 6, which shows the merging of two overlapping clusters. We assume that initially they are out of synchronization, in the sense that their activity cycles are out of phase. This is a situation which often occurs in practice, for example in and around buildings, with temporary blocking of wireless connections between nodes which are critical to maintaining the connectivity of the network. The details of convergence depend on many factors, including the topology and the initial distribution of clock phase, and dispersion of clock frequencies, the effect of collisions and other packets errors, which could cause nodes to miss beacons resulting in even longer coalescence times. Moreover the synchronization time will be larger for larger networks. For example, if the network consists of a chain of M clusters, then the convergence time may increase by a factor of M.

Dependence of system synchronization time on system size. Synchronization time versus node number for the coalescence of two separate compact cells of similar size via a single node which is within range of both. T: Beacon period, N: number of nodes in each cell (assumed equal). Activity and beacon generation intervals in the two cells are assumed to be initially out of phase. A linear estimate valid for small cells shows the worst case synchronization time is proportional to 2T
We have proposed a protocol for managing the spontaneous coordination of sensing activity in a group of wireless sensor nodes. A unique feature of our protocol is the use of an activity parameter which can be determined by the user or application, and included in the sensing request issued by the command node. This parameter allows strategic adjustment of the tradeoff between sensing capacity and other performance characteristics such as operation lifetime.
We have shown the applicability of the proposed protocol to a prototype system of sensors which can be used for sensing temperature, allowing temperature data to be collected with varying spatial resolution in an energy efficent way. The energy efficiency is accomplished by suppressing unnecessary sensor activity according to the demands of the user.
Recently, a number of different methods have been proposed for self-organization in wireless sensors. For example, Ye et al. at UCLA [3] have proposed and demonstrated a medium access protocol with coordinated adaptive sleeping, called S-MAC. Chen et al. at MIT [4] have proposed the SPAN algorithm, a distributed random algorithm where nodes make local decisions on whether to sleep or to join a forwarding backbone. In each of these two cases, system lifetime increases as the ratio of idle-to-sleep energy consumption increases. Our proposal extends the principle of self-organized coordination and cooperation to higher levels of activity management, including dynamically changing demands of the users with regard to sensing resolution.