
Abstract
Mobile ad hoc networks are self-organizing networks that provide rapid network connectivity in infrastructureless environments. Most routing protocols designed for MANETs assume connected networks. Such a restriction directly limits the application domains of MANETs. In this paper, we study the problem of providing time-critical data delivery in sparse ad hoc networks where network partition can last for a long period, without imposing any restrictions on the node mobility. Supporting real-time communication with unconstrained mobility is important to many mission-critical applications such as battlefields and search and rescue in large-scale disaster areas.
In this paper, we propose microrouting networks consisting of tiny nodes similar to sensors but without transducers (called microrouters) as a substrate for time-critical data delivery in sparse MANETs. We describe the microrouting protocol for the resulting hybrid network which exploits the fact that microrouters are stationary, but are constrained by energy and memory. Key features of the microrouting protocol design include stateless architecture and localized route repair. We demonstrate the viability of the microrouting network architecture via detailed simulation evaluation. Our results show that microrouting networks running the microrouting protocol efficiently extend the connectivity of sparse MANETs and provide high packet delivery ratios.
Keywords
Introduction
A mobile ad hoc network (MANET) consists of a collection of wireless mobile nodes dynamically forming a temporary network without relying on any existing network infrastructure or centralized administration. A fundamental challenge in MANETs is the design of scalable and robust routing protocols that can provide any-to-any communication among its participants. Most routing protocols designed for MANETs assume connected networks, i.e., a multi-hop path exists between any two nodes. Such an assumption restricts the geographic area of operation to be a function of the number of nodes and their radio transmission range, and thus directly limits the application domains of MANETs.
In this paper, we study the problem of supporting real-time data delivery in sparse MANETs in
which network partitions happen frequently and can last for a long period, without imposing any
restrictions on the mobility of the participating nodes. One can envision many practical application
scenarios in which a small number of mobile nodes (participants) are deployed in large geographic
regions. Such sparse deployment scenarios can arise due to budgetary limitations, the nature of the
applications, or physical constraints of the environment. For example, in a battlefield, several
units of soldiers can be dispersed in a large combat zone. As another example, in a large disaster
area, a large number of small teams of personnel can be roaming around performing search and rescue
operations. Any mechanism supporting data delivery in such applications needs to satisfy the
following three criteria: Frequent network partitioning: The mechanism needs to be able to operate under
frequent network partitioning, since the area covered by the mobile nodes may be large and any fixed
infrastructure is not available or may have been damaged. Real-time communication: The mechanism needs to support real-time communication
as the tasks being carried out such as disaster relief are often time-critical. Unconstrained mobility: The mechanism should not impose any controlled mobility
as certain imposed movement of nodes may not be feasible due to the inhospitable terrain, enemy
fire, obstacles due to a disaster, etc. Additionally, in such critical application scenarios, the
tasks to be accomplished can be fundamentally more important than ensuring connectivity, i.e., the
mobile nodes may not be able to simultaneously perform their duties efficiently and adjust their
movements to ensure connectivity. For example, in disaster relief, it is more important to search a
large area quickly than to stay connected but search a small area.
In summary many critical applications of MANETs like disaster relief and military operations are characterized by sparse deployment, real-time communication, and unconstrained mobility which require a new communication paradigm that is flexible, efficient, and easily deployable.
There have been several recent work on supporting data delivery in sparse or disconnected networks via exploiting the mobility of nodes in MANETs [1], [2], [3], [4], [5]. Such mobility-based protocols either exploit the existing mobility of the nodes to buffer and deliver messages across network partitions [2], [3], or require nodes to move in a controlled manner to ensure network connectivity [1], [4], [5]. Relying on existing node mobility for message delivery can suffer from high delays and potentially unreliable data delivery. Altering the movement of mobile nodes is limited to application scenarios where such altered movement is feasible and does not interfere with the tasks being performed. Therefore, these mobility-based approaches are unsuitable for the class of mission-critical applications that we envision.
In this paper, we propose to use microrouting networks consisting of tiny nodes, called microrouters, which are similar to sensors but without transducers as a substrate for data delivery in sparse MANETs. Unlike sensor nodes, such microrouters are expected to be cheaper, smaller, and have a higher lifetime since they do not need to be equipped with sensing devices that increase the cost, size, and energy usage. Like sensor nodes, such microrouters can be easily and quickly deployed to cover a geographic region in which a small number of mobile wireless nodes will be sparsely deployed to perform short-term or time-critical missions. For example, in Fig. 1 a military unit consisting of soldiers and vehicles deployed in a large area uses the underlying microrouting network to communicate and coordinate their activities. Such a substrate is easily deployable in inhospitable terrains or disaster stricken areas. At the same time, it decouples the mobility of these nodes (soldiers, rescue personnel, military vehicles, rescue robots, etc.) from the task of maintaining connectivity amongst them and thus the mobile nodes can optimize their mobility solely based on the need of the mission. Our study demonstrates that this substrate provides high data delivery rates with low overhead and delays for such sparse MANETs. We believe many mission-critical applications can greatly benefit from this new communication paradigm.
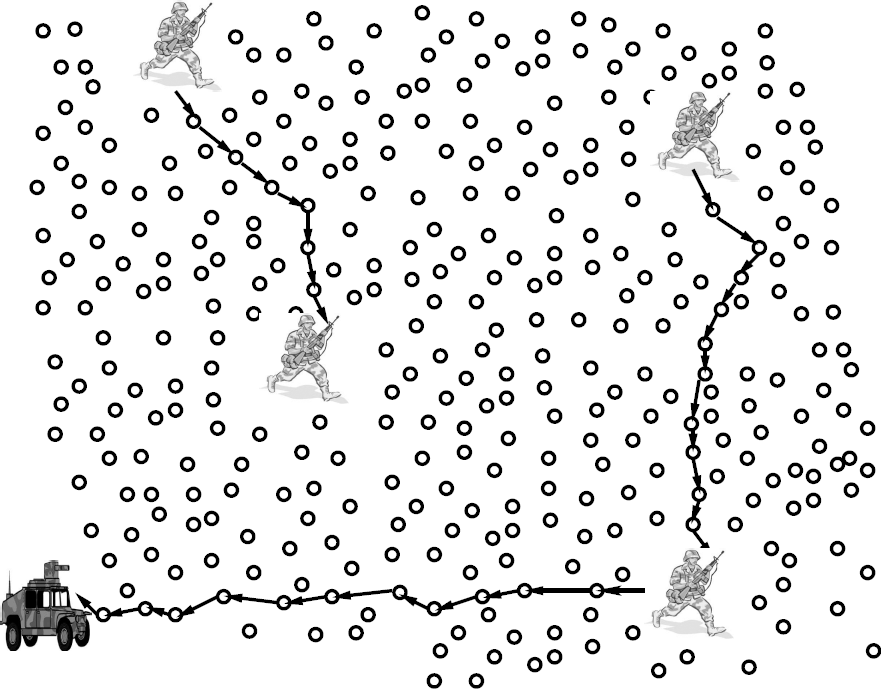
A microrouting network. Soldiers and military vehicles use the routing substrate to communicate.
A primary challenge in using microrouting networks is to design a multi-hop routing protocol that provides efficient and reliable data delivery to its mobile participants. The key characteristics of such a protocol are stateless operation, energy efficiency, and robustness. The protocol ideally should be stateless and robust since the microrouters are likely to be intermittently available due to frequent wake/sleep cycles for energy savings and due to external interference in hostile environments. Additionally, microrouters are energy- and memory-constrained devices which can only support minimal routing protocol capabilities.
The rest of the paper is organized as follows. Section II discusses previous work on data delivery in sparse MANETs. Section III describes the characteristics of microrouting networks and compares it with traditional ad hoc networks and sensor networks. Section IV provides a detailed description of the microrouting protocol for microrouting networks. Section V provides an analysis of the routing overhead incurred by the various components of the microrouting protocol. Section VI presents simulation results and finally, Section VII concludes the paper.
Previous research on data delivery in sparse MANETs have largely focused on exploiting the mobility of nodes to buffer data packets during network partitions and forward data packets when the network is connected again. Such mobility-based protocols are thus suitable for delay-tolerant applications such as sensor data collection. These approaches can be classified as proactive and reactive schemes. Reactive schemes typically exploit the existing mobility of the nodes to buffer and deliver messages across network partitions, while proactive schemes require nodes to move in a controlled manner to ensure network connectivity.
Epidemic routing [2] is a reactive scheme in which disconnected nodes rely on their own mobility to allow them to get reconnected. It relies on random pair-wise exchanges of messages among nodes for eventual messages delivery. Subsequently, Davis et al. [3] propose a reactive scheme that exploits node movement patterns for efficient packet passing. Li and Rus [1] propose a proactive approach in which mobile nodes actively modify their movement for data delivery and network connectivity. It provides an algorithm that guarantees message transmission with minimum time and minimum trajectory modifications. More recently, two more proactive approaches have been proposed. In [5], Zhao et al. propose message ferrying which utilizes a special set of nodes called ferries with known non-random movement patterns which are used by nodes in the MANET for data delivery. In [4], Goldenberg et al. propose mobility as a network control primitive. They exploit controlled node mobility to provide adaptive, self-configuring networks that improve the communication performance.
A considerable amount of work has been done on topology control [6], [7], [8] which involves the adjustment of transmit powers of nodes in order to maintain certain network properties such as connectivity. However, this approach assumes that transmission powers can be arbitrarily adjusted and can lead to rapid energy drain of the nodes.
Several protocols [9], [10] have been proposed for sensing and data collection in sparse sensor networks that arise in many applications such as wildlife monitoring. They propose the use of mobile nodes to disseminate data in sparse sensor networks.
Instead of a larger number of small microrouters, a smaller number of larger devices such as UAVs, satellites, or mobile vehicle basestations could potentially be deployed/ used solely to enhance network connectivity without constraining the mobility of the existing nodes. However, such solutions could deplete the energy of the existing mobile nodes by requiring them to transmit over larger distances since these larger devices cannot be deployed ubiquitously. Additionally, unlike microrouters that can be sprayed anywhere, mobile vehicles may not be deployable in all scenarios due to the terrain. Further, with advances in manufacturing techniques, microrouters are likely to be more cost-effective than these approaches.
Microrouting Networks
In this section, we discuss the architecture of microrouters, the characteristics of the corresponding microrouting network, and the design principles of the microrouting protocol.
Microrouter Architecture
The microrouting networks we propose in this paper consist of microrouters that are similar to sensor nodes in sensor networks except that they do not contain any transducers for performing sensor operations in order to reduce costs and form factor. To be easily deployable, these microrouters need to be low cost and dispensable, and have a small form factor. Figure 2 shows a schematic diagram of a microrouter. Each microrouter is made up of a processing unit, a transceiver unit, and a power unit.

Architecture of a microrouter.
The processing unit is associated with a small memory unit, and implements the microrouting protocol (explained in Section IV). Like in sensor nodes, the memory unit available to the processing unit is a scarce resource. For example, the smart dust prototype has 512 bytes RAM and 512 bytes EEPROM [11] while the MICA2Dot [12] nodes have 128 Kbytes of program flash memory and 4 Kbytes EEPROM. The transceiver unit performs wireless communication. Typically the radio design of a microrouter can be similar to that used in current MICA motes. The power unit can be a one-time energy source such as a battery when a microrouting network is deployed for short-term missions. It can also be a power scavenging unit in medium-term to long-term deployment scenarios. In either case, microrouters need to be energy-efficient to extend the lifetime of the network.
We assume that the microrouters are not equipped with location finding units such as GPS for the
following reasons as argued in [13]:
GPS units have a high production cost, especially when a large number of microrouters are to be
equipped. GPS devices may not be able to function in environments such as indoor locations or locations
with dense foliage or obstacles that block the line of sight from GPS satellites. The power consumption of the GPS devices would reduce the battery life of microrouters. A GPS and its antenna increase the form factor of the microrouters. This inhibits the easy
deployment of microrouters. Note that assuming no position information reduces the applicability of
sensor routing protocols that can deliver data to mobile sinks [14] in microrouting networks.
In summary, microrouters are memory-constrained, energy-constrained, low cost devices. Since the goal of a microrouting network formed by stationary microrouters is to provide data delivery to mobile nodes in a sparse MANET, the multi-hop routing protocol needs to be supported on both the microrouters and the mobile nodes in the resulting hybrid network. For simplicity, in the rest of the paper, we will refer to the hybrid network as the microrouting network.
We discuss the unique characteristics of microrouting networks by comparing them to traditional mobile ad hoc networks and sensor networks as shown in Table I.
Comparison of the three network architectures

Comparison of the three network architectures
MANETs are envisioned to have typically few hundreds of nodes, whereas sensor networks are much larger in scale. A microrouting network has a large number of microrouters similar to a sensor network to ensure coverage and connectivity. The typical radio range in a MANET is higher than most sensor nodes. In contrast, a microrouting network may have heterogeneous ranges, small for the microrouters and larger for the mobile nodes. Also, the node density of a MANET is generally lower than that of a sensor network. The node density of a microrouting network is similar to that of a sensor network. In a MANET, all the nodes are generally mobile and thus the topology is highly dynamic. A sensor network has typically static sensor nodes. However, a change in topology can still occur due to failure of a sensor or due to sensors that have run out of energy. Thus, sensor networks have a slowly changing topology. In contrast, a microrouting network has nodes that are constantly mobile and microrouters that are static and susceptible to failures and energy constraints similar to in a sensor network. In MANETs and microrouting networks, any mobile node can communicate with any other mobile node. However in a sensor network, the sensors typically communicate only with the sink, resulting in a many-to-one communication pattern. Finally, in a MANET, globally unique identifiers (IDs) are required to identify and communicate with all the nodes. In a microrouting network, unique IDs are similarly required for both mobiles as well as microrouters to enable end-to-end connection establishment and maintenance. However, microrouters can be addressed separately from mobile nodes since they do not initiate or terminate a flow. Sensor nodes need not be individually addressable for typical sensing applications.
The unique architecture of microrouters and the characteristics of microrouting networks dictate
the following design principles for the multi-hop microrouting protocol. Stateless Architecture: The protocol for the microrouters should be stateless
since microrouters are resource-constrained devices with limited memory and energy source. In
addition, they also suffer from intermittent availability due to frequent wake-sleep cycles when
using energy saving techniques. Thus, stateless techniques like source routing may be more useful in
microrouting networks since they can be efficient in the presence of intermittent availability. Localized Route Repair: The protocol running on the mobile nodes should minimize
the frequency and extent of route discoveries. In large scale networks, such flooding-based route
discoveries lead to the broadcast storm problem [15] as well as energy drain. More importantly, any repair
technique performed by the microrouters should ideally be stateless.
Previously proposed sensor routing protocols can not be readily used in microrouting networks. The primary goals of sensor routing and data dissemination protocols are data aggregation and efficient dissemination. Most protocols propose the use of data-centric routing in place of node-centric routing required in a microrouting network. Also, the majority of the protocols developed for sensors do not deal with highly dynamic topology caused by mobility of nodes, whereas microrouting needs to handle such mobility. Exceptions are dissemination protocols such as TTDD [14] which handle only sink mobility. However, TTDD assumes the presence of GPS on sensor nodes. Additionally, both endpoints of a flow in a microrouting network may not be resource-constrained and may have replenish-able energy resources unlike in a sensor network. This would not be exploited by sensor routing protocols.
Similarly, off-the-shelf MANET routing protocols can not be readily used in microrouting networks. Most of the protocols proposed assume resource rich nodes all along the path which can keep a large amount of state and perform a lot of computation. Hop-by-hop routing protocols like AODV [16] and DSDV [17] need to maintain state on intermediate nodes for forwarding packets and consequently their routing table sizes grow with the network size or the number of active packet sources. For example, in AODV, each intermediate node along the route maintains a routing table for forwarding packets, a packet buffer for local repair, and backward pointers for route error propagation. In the presence of intermittent availability, such state may be lost frequently along paths causing costly rediscoveries. In DSR, each node maintains a cache of source routes that may be a graph [18] or a list of paths [19]. Intermediate nodes use the cache to salvage packets with stale routes and reply to route requests. Additionally, AODV, DSR, and TORA [20] are unsuitable for microrouting networks since they all frequently invoke global flooding of route requests to discover routes to destinations. Finally, protocols developed for MANETs fail to take advantage of the static nature of microrouters in microrouting networks.
Microrouting Protocol Design
This section presents the design of the microrouting protocol, μRP, for supporting data delivery between sparsely deployed mobile nodes in microrouting networks. μRP is used as a representative routing protocol to demonstrate the viability of the microrouting network architecture. Conceptually, μRP has two distinct and separate modules. The first module runs on the energy- and memory-constrained microrouters. The second module runs on the mobile nodes which have larger memory and more energy. The two modules are designed to inter-operate seamlessly to provide end-to-end connectivity between mobile nodes while exploiting the characteristics and capabilities of the devices they run on. Since μRP uses source routing, it is similar to DSR in many aspects and can be thought of as an adaptation of the DSR protocol for microrouting networks.
Node Addressing
Each mobile node is addressed using an IP address. We assume some address assignment algorithm exists which assigns these to mobile nodes. Since the microrouters do not act as endpoints of communication, we can efficiently encode their addresses with the minimum number of required bits rather than using 32-bit IP addresses. This significantly reduces the overhead of using stateless source routing which encodes addresses in packets. Additionally we assume that the address of a device can be used to distinguish between it being a microrouter or a mobile node. This can be easily achieved, for example, using a predefined prefix for the addresses of the microrouters.
Transmission Range
Mobile nodes and microrouters can potentially have different transmission ranges, and this hybrid nature of microrouting networks can result in unidirectional links. The results in [21] show that using unidirectional links does not generally improve performance and should be avoided. Thus, in a microrouting network, the transmission range of the mobile nodes is adjusted to be similar to that of the microrouters. This also conserves the energy of the mobile nodes.
Route Discovery
μRP discovers an initial route between a pair of mobile source and destination nodes
reactively. When a mobile node S needs to send packets to a
destination D for which it has not discovered a route, it floods a QUERY packet
into the microrouting network in a way similar to route discovery in reactive routing protocols such
as DSR and AODV. Each microrouter that has not previously received the Q
Due to memory constraint, the microrouters along the path of the reply do not cache any route
information and consequently no intermediate replies are possible for route discoveries. Once the
Q

μRP route discovery and repair.
Since the two end nodes of a route, i.e., the source and destination nodes, are mobile, both the first hop and the last hop of the route will break as the two nodes move. Figure 3(b) shows that the source has moved from S to S∗, which is beyond the transmission range of the first microrouter M1, breaking the first hop. Similarly, the destination node has moved from D to D∗, which is beyond the transmission range of microrouter Mn. This movement breaks the last hop of the route.
μRP uses two different local repair mechanisms to fix breakage of the first hop and the last hop, instead of frequently rediscovering a new route using a network-wide flooding.
Source local repair
On the source node side, μRP uses a reactive scheme for local route
repair. This reactive scheme is low overhead and does not require any maintenance of state. When the
first hop breaks, the source node first tries to use its current graph cache to construct an
alternative route to reach M1 or other nodes on the path. If such a
route cannot be found, it performs a search of its L-hop neighborhood by
broadcasting a N
Destination local repair
On the destination side, μRP could potentially use the same technique as used on the
source side to repair broken paths, i.e., the last microrouter on the path to the destination can
invoke a Q A microrouter is memory constrained and such a technique would require it to buffer data packets
until the route is repaired. Invoking a Q A microrouter would not be able to adhere to its sleep-wake duty cycles since it would have to
remain awake to successfully receive a reply to the Q
Due to all these factors, on the destination node side, μRP uses an adaptive
proactive scheme for local route repair which does not burden the microrouters with
excessive memory or processing requirements. After replying to an initial route discovery, the
destination node D prepares to receive data packets. As it moves, it invokes a
beaconing procedure to leave a “trail” in the microrouting network for data packets to
follow. Periodically, D broadcasts a T
When node D moves at high speed, it is possible that it has moved beyond K hops from MN by the time the next data packet reaches MN. In this case, the route is repaired and extended recursively till it reaches the destination.
Note that node trails can be used for repairing all connections intended for a particular node from multiple sources. Also, note a mobile node initiates the periodic beaconing only if it is currently receiving data packets from other nodes, and periodic beaconing from a destination node can repair packets coming to it from multiple sources.
Pre-emptive Route Discovery
When S discovers a route to D initially, it records the original hop count of the route (H) in its localization table. As time progresses, due to route repair on both sides, this route could potentially shrink or grow in hop length. S keeps track of the hop length growth and if it grows to H + h hops where h = α·H, the node performs a pre-emptive route discovery. The motivation behind this pre-emptive rediscovery is to prevent repaired routes from becoming arbitrarily long by discovering shorter routes to the destination. If routes become too long, that very fact can adversely affect the delivery of packets. Thus, preemptive discovery effectively bounds the length that a route between any two nodes is allowed to grow relative to the shortest path between the two nodes at the cost of slightly increased overhead. α is a system parameter chosen to be 0.75 for reasons explained in Section VI-B.
In order to localize the query, the new route discovery is limited to a radius of H + h hops which will cover the expected zone the destination node D would exist in.
Handling Microrouter Failures
Since microrouters have limited energy and can be deployed in hostile environments such as enemy territories or disaster recovery areas, they may fail unexpectedly while serving as intermediate hops for some active routes. μRP uses an intermediate repair mechanism to deal with such failures. When a delivery failure is detected by a microrouter when forwarding a data packet to another microrouter, it changes the packet to broadcast mode and initiates a 2-hop broadcast of this data packet to attempt to reach the next hop node after the failed node in the source route. In addition, it sends an error packet to the source to inform it of the link break. If the next hop node after the failed node in the source route receives the broadcast, it changes the data packet mode back to source routing and continues the transmission. Due to the low bandwidth in microrouting networks, congestion may cause failures to occur frequently. To compensate this, intermediate repair retries a unicast of the packet after a random backoff before initiating the 2-hop broadcast discussed above.
Memory Requirement
Each microrouter uses a constant amount of memory. It needs to store a sequence number per source
node. Additionally each node has a small cache of m source routes for storing
node trails. m is configured to be as small as 5 to conserve memory resources on
the microrouters. Apart from this mini-cache, the microrouters store no other routing state. Note
that unlike the DSR route cache in which each path is of length
ANALYSIS
In this section, we analyze the routing overhead incurred by different components of μRP. such an analysis helps to understand the benefits of the local repair design principle of μRP and the choice of parameters in the operation of μRP.
We use
Route Discovery
The route discovery procedure is invoked when a route to D is requested for the
first time, and during subsequent occurrences of pre-emptive route discovery. All route breaks,
either the source-to-microrouter, microrouter-to-microrouter, or microrouter-to-destination, are
repaired locally. S performs a pre-emptive route discovery every time the hop
length from S to D grows to H +
h hops where h = α · H. With an average speed
of υ, the average interval for the two end nodes to move beyond h =
α · H hops away is proportional to
Source Side Repair
μRP uses a reactive scheme to locally repair the source-to-microrouter link of a
connection when it breaks. The local repair involves an L-hop flooding of a
N
Destination Side Repair
μRP uses a proactive scheme to locally repair the microrouter-to-destination link of a
connection when it breaks. To leave a trail in the microrouting network, the destination node
D periodically broadcasts a Trail packet with a TTL value of K.
The overhead of such periodical broadcast is thus
Microrouter Failure Repair
The microrouter-to-microrouter local repair happens whenever such a link along the connection between S and D breaks due to either energy drainage, congestion, or unexpected interference in enemy territories. In this analysis, we assume the impact of congestion and interference from adversaries is insignificant compared to the effect of battery drainage. A route consisting of (p − 2) microrouter-to-microrouter links will experience a microrouter-to-microrouter link failure at an average rate of (p − 2) · λ m per second under the assumption of independent and exponentially distributed link failures. Each microrouter failure although rare triggers a full route discovery. Thus the local repair overhead for microrouter failures is approximately proportional to N · (p − 2) λ m , where N is the number of nodes in the network.
Comparison
We compare the overhead of μRP with that of μRPbasic which does not incorporate any local repair. Since in microrouting networks, intermediate nodes (microrouters) do not maintain a route cache due to resource constraints and thus cannot reply to discoveries, each flooded route discovery has a cost of N where N is the number of nodes in the network. The μRPbasic protocol initiates a route discovery on every route break detection. Thus the overhead incurred by μRPbasic in a time interval T is given by N + N · λ basic · T, where λ basic is the rate of route failure and the first term N reflects the cost of initial route discovery. We can define the lifetime of a route of length p as Tp = min(L1, L2, …, Lp) where Li is the lifetime of the ith wireless link as described earlier.
Thus Tp is also an exponentially distributed random variable with a
mean of
In summary, the overhead cost of μRPbasic is given by

and based on the analysis of the repair techniques, the overhead cost of μRP is

The above equations show that without repair, the protocol incurs much higher overhead than with
local repair. Since the values of L and K are very small, i.e., in
the range of 2 and 3 as shown in Section
VI, the overhead for a first or last hop repair is far less than that of a route discovery,
as
Performance Evaluation
In this section, we first describe our simulation methodology and then evaluate the routing performance of μRP. our performance comparison primarily focuses on μRP since it is to the best of our knowledge the first protocol developed for microrouting networks. Other protocols developed for MANETs such as DSR and AODV cannot be fairly compared to μRP since they involve maintaining a lot of state (packet buffers, route caches, next hop tables, black lists for route errors, etc.) and processing on the microrouters.
Simulation Methodology
We implemented μRP in the Glomosim [22] simulator. Glomosim is a widely used simulator for wireless networks with a comprehensive radio model. The effects of multiple access interference, capture, RF propagation, signal strengths, and propagation delays are modeled in Glomosim.
Microrouter Model and Deployment
We model our microrouters after MICA Motes [12] except that they do not have transducers. The simulator implements a 802.11-based MAC layer and the microrouters use this as the MAC protocol. 802.11 has been widely used [23], [24], [14] in simulation evaluation of sensor networks. In this study, we do not assume the use of topology control algorithms during the deployment of the microrouters. The devices are assumed to be sprayed and randomly placed in the target area. The experiments consider a data rate of 200Kbps and a 220m radio range for the microrouters and mobile nodes similarly as in [24]. This range can already be achieved by the MICA2Dot [12] motes currently available, while newer 802.15.4 Motes will achieve a rate of 250Kbps.
Traffic and Mobility Models
We use the modified random waypoint mobility model [25] to simulate the movement of mobile nodes. Nodes move without pausing at a speed randomly chosen between [1–9] m/s. Traffic is generated and received only by the mobile nodes and the microrouters only forward traffic. We assume constant bit rate (CBR) traffic, same as in previous MANET protocol comparison studies (e.g. [26], [27]). Each mobile node initiates one random CBR connection to another mobile node with a packet rate of one 32-byte packet/sec. The simulation duration is 15 minutes and the simulation results are averaged over multiple runs.
Energy Model
Efficient usage of the limited energy of microrouters can extend the operation lifetime and connectivity for mobile users. Microrouters consume energy due to computation (packet processing, routing, etc.) and wireless communication. Our focus in this study is on the costs of wireless communication. Since our work focuses on the routing layer, we do not assume a lower layer protocol that coordinates the wake/sleep cycles of microrouters. Since a microrouter's radio is expected to be similar to that of a MICA Mote, we adopt the radio energy consumption parameters of the MICA2Dot Motes [12]. Specifically, the current drawn for transmission is 25mA and that for reception is 8mA. We modified the Glomosim radio layer to include these energy consumption metrics. The transmit and receive durations of each node were logged and the corresponding energy consumption calculated.
Metrics
We use the following four metrics to evaluate the performance of μRP: Routing overhead — the number of control packets transmitted to discover
and maintain routes between mobile nodes. Packet delivery ratio (PDR) — the ratio of the number of successfully
received data packets to the number of data packets sent. Delay — the average time between transmission and reception of data
packets. This metric accounts for all possible delays caused by buffering during route discovery
latency, queuing at the interface queue, retransmission delays at the MAC, and propagation and
transfer times. Energy consumption — the communication energy consumed during
transmission and reception, for microrouters only.
Effect of Local Repair Ranges
In this section, we evaluate the effects of two important design choices for μRP: the node trail depth K used in destination repair and the sender repair depth L. The evaluation scenario consists of 20 mobile nodes continuously moving in an area of 16 km2. Microrouters are deployed with a density of 10 microrouters per radio range.
Table 2 depicts the effect of
varying K on the performance of μRP. Apart from the overall overhead, PDR,
and delay, we also show the number of packet drops that occur between the last microrouter on a path
and the destination mobile node as well as the overhead incurred due to T
Effect of destination repair parameter K ·
L=3

Effect of destination repair parameter K · L=3
When node trails are not used (K=0), 371 packets are dropped due to breaks between the last microrouter and the destination, and μRP incurs an overhead of 391,890 packets. When node trails are used, K=2 is the best choice. At K=2, the number of drops reduce from 371 to 3 while the overall overhead reduces by 67%. This is because after each repair, a special repair error and the repaired local route are sent back to the source of the packet, avoiding costly route discoveries. Additionally, the PDR is increased by 2%. As K is increased further, the proactive beaconing overhead increases without an increase in rescued packets.
Table 3 depicts the effect of
varying L on the performance of μRP. The repair overhead is due to
N
Effect of sender repair parameter L · K=2

The results show that a value of L=3 results in the lowest total overhead due to the lowest number of queries sent. Also, an increase beyond L=3 is not beneficial since the repair overhead grows without any increase in the success rate of the repair. Note that sender side repair is more flexible and robust since it is performed by a mobile node which can use its graph cache to repair routes aggressively.
Table 4 depicts the effect of
varying α on the performance of μRP. In the table, PQuery is the total number of
pre-emptive Q
Effect of pre-emptive request control factor α · K=2 and L=3

Capacity of microrouters

In this section, we evaluate the effectiveness of the three local repair mechanisms in μRP: sender side repair, intermediate repair, and destination side repair. The evaluation scenario consists of 20 mobile nodes continuously moving in terrains with varying areas ranging from 1 to 36 km2. Microrouters are deployed with a density of 10 microrouters per radio range.
Figure 4 depicts the performance of various versions of μRP. The basic version of μRP depicted has no repair whereas the final version of μRP has all three local repair techniques. The three other curves depict the performance of μRP with each feature individually turned on. The following important observations can be made from the results. Firstly, μRP with all features turned on significantly reduces the overhead (e.g. by 80% in 36km2) and energy consumption (e.g. by 72% in 36km2) while always delivering 99% of the packets as the size of the microrouting network increases. This high data delivery rate is essential in critical military and disaster relief applications. The results show that stateless repair techniques used in μRP can significantly reduce the overhead and energy consumption in microrouting networks while keeping the microrouters as simple as possible. Secondly, destination side repair using node trails is the single feature that improves the performance of μRP basic the most. This technique is effective in spite of using a small fixed size cache (to store trails) and not using any packet buffers (for salvaging packets). Thirdly, all versions of μRP have an acceptable delay which grows slowly as the network size increases. Delays are increased due to the limited bandwidth of microrouters (200Kbps) and large distances traveled by the packets. However, these delays are acceptable compared to reactive mobility-assisted schemes which may have unbounded delays.

Effect of local repair techniques on routing overhead, PDR, delay, and energy consumption. The x-axis corresponds to the side length of the square terrain in meters, e.g., 5000m corresponds to an area of 25 km2.
A side effect of the local repair mechanisms used by μRP is that routes between nodes may grow longer and longer as more and more sender side and destination side repairs are carried out without a global route discovery. However, the graph cache used by μRP can naturally discover shortcuts in routes. Additionally, μRP pre-emptively generates route queries when path lengths grow too large as explained in the design. These two mechanisms help to ensure that path lengths remain close to the current physical proximities of the sources and destinations.
Figure 5 shows the evolution of the path lengths (number of hops) for successfully delivered packets over the duration of the simulation with and without the local repair features. Three different connections are randomly chosen out of the 20 connections, and the path lengths of the packets that travel over each of these connections are depicted. The results show that although μRP uses slightly longer path lengths because of its repair features, it is able to adapt to changes in the proximities of the connection endpoints due to its pre-emptive queries and graph cache based route shortening. For example, in both connection 2 and connection 3, the path lengths initially grow significantly larger than the shortest path between the endpoints. However, μRP quickly detects such changes and reduces the path length pre-emptively to better reflect the physical proximity of the connection endpoints. Note that although longer path lengths cost more energy to deliver packets, μRP reduces the overall energy consumption by limiting costly flooding-based route discoveries.
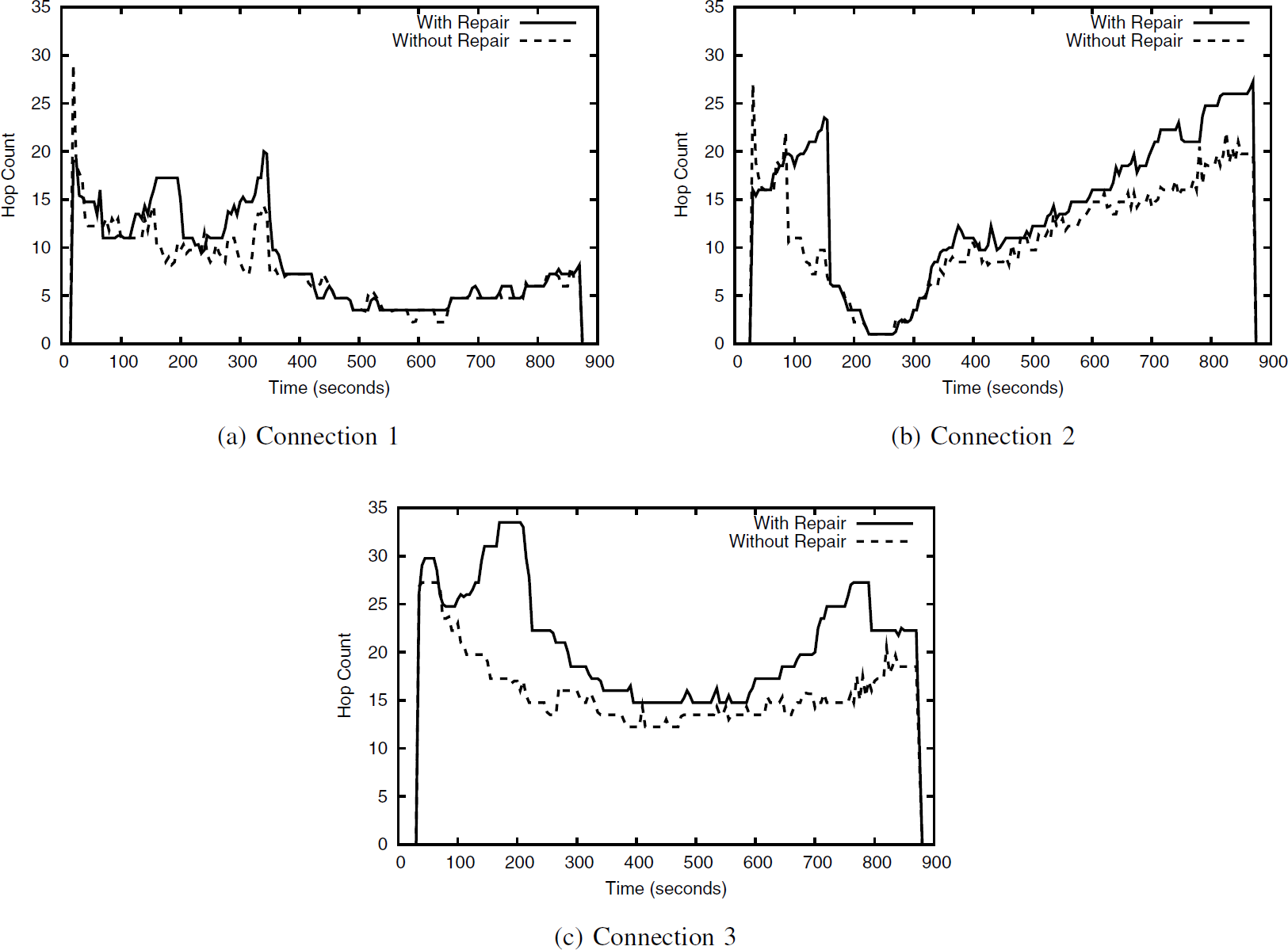
Variation of the path length when MRP repair feature is enabled as a function of simulation time.
This section evaluates the performance of μRP under varying microrouter density and deployment scenarios. These results are useful in determining the number of microrouters required for a given area. We vary the microrouter density d in a given area as 2, 5, 10, and 15 microrouters per radio range. As before, we vary the area of deployment from 1 to 36 km2. In each chosen area, 20 mobile nodes are randomly distributed.
Figure 6 depicts the performance metrics for μRP as the terrain area is varied and the network becomes increasingly sparse. The results show that as expected with increased network area and minimal microrouting support (d = 2), the PDR falls quickly as the network area grows. The results show that a density of 10 microrouters per radio range is sufficient for adequate packet delivery with low overhead. Increasing d to 15 does not improve packet delivery bit increases the overhead and energy consumption. Interestingly, a d of 5 also provides good PDR with low overhead. However, this density is not as resilient to failures as we show in Section VI-F. We also show what the performance would be when no microrouters exist. This scenario involves running DSR on each mobile node in a sparse ad hoc network. As expected, due to the sparse connectivity and frequent partitions, DSR has the lowest PDR. The slightly higher PDR of DSR compared to MRP (d = 2) in the smallest network size is because the density of mobile nodes is high enough that they can form multi-hop routes.

Effect of microrouter density on routing overhead, PDR, delay, and energy consumption. The x-axis corresponds to the side length of the square terrain in meters, e.g., 5000 corresponds to an area of 25km2.
Thus, the provisioning of microrouters should be based on both the connectivity required as well as the failure rate. Although a reduced density of microrouters may provide adequate connectivity, the resilience of the microrouting network to failure reduces as well.
In this section, we evaluate the resilience of μRP to failure of microrouters. Such failure could be due to the hostile environment, physical destruction, or depletion of energy. In the absence of repair and recovery techniques in μRP, such failures would significantly affect packet delivery. We denote failure rate β as the percentage of microrouters that will fail on average over the simulation duration. For example, β=10% means that on average 10% of the microrouters will fail at random times in the simulation duration (15 minutes). A failure rate of 100% means on average all nodes will fail by the end of the simulation duration. We assume that a failure renders a microrouter unusable.
Figure 7 depicts the performance of μRP deployed with two microrouter densities (5 and 10) for a terrain of 16 km2. The results show that PDR for a density of 10 drops gradually as the number of failure increases and only drops significantly for a massive number of microrouter failures in the network. A lower density of 5 performs worse because the connectivity is affected more in sparser networks. Overall, μRP is quite resilient to failures. The stateless design of μRP ensures that such failures do not significantly degrade data delivery since μRP routing and repair techniques do not rely on any specific microrouter to ensure data delivery. Packets can be forwarded by neighboring functioning microrouters without incurring extra overhead.
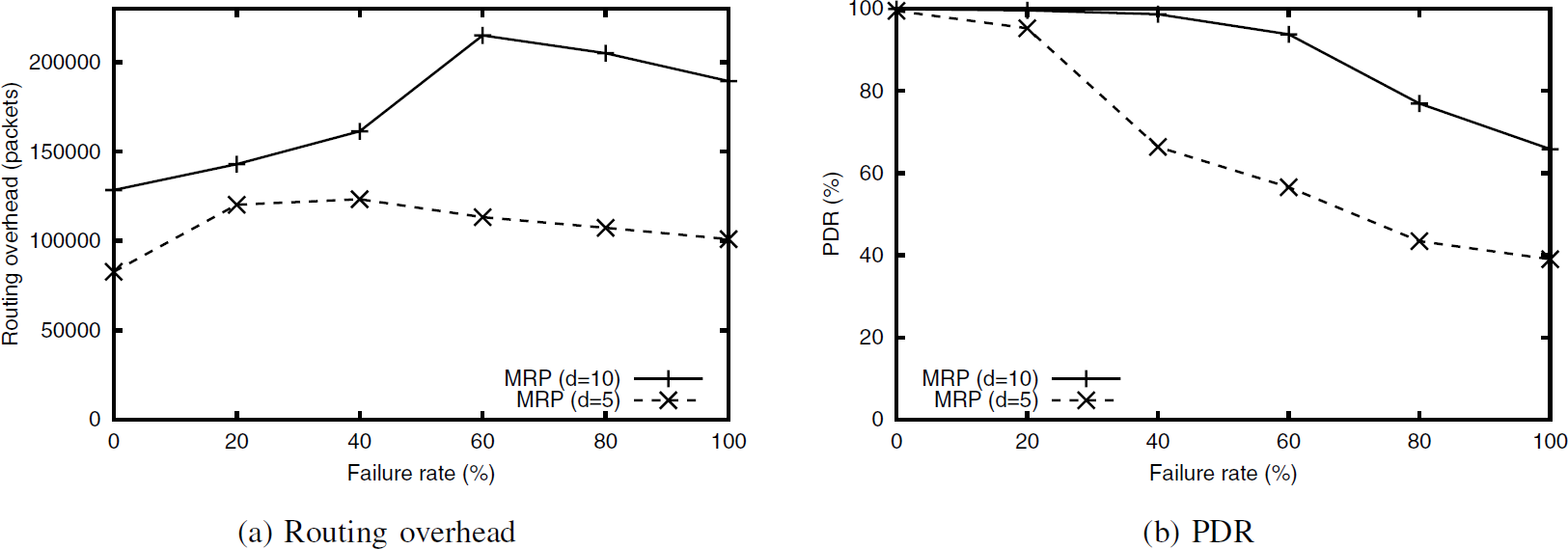
Effect of microrouter failures on routing overhead and PDR.
In this section, we evaluate the scalability of microrouting by varying the number of mobile nodes deployed in an area. We consider an area of 25 km2 and vary the number of mobile nodes deployed from 10 to 30 in that area. Table 4 depicts the performance results. Note that increasing the number of mobile nodes increases the data traffic volume in the network.
The results show that as the number of mobile nodes in the network increases from 10 to 30,
μRP routing overhead increases superlinearly. This happens due to the increased number of
Q
Conclusions and Future Work
In this paper, we proposed microrouting as a new paradigm for real-time communication in sparse mobile ad hoc networks without imposing any controlled mobility on the participating nodes. Microrouting employs microrouting networks consisting of low cost and easy to deploy microrouters that are similar to sensors but without transducers to provide the connectivity in a geographic area in which a small number of mobile hosts will be sparsely deployed. We designed a new routing protocol to demonstrate the viability of the resulting hybrid microrouting network architecture. The microrouting protocol for the microrouting network takes advantage of the immobility of microrouters to improve the robustness of the routes, while maintaining minimal state at the microrouters to satisfy their energy and memory constraints. Our evaluation results showed that microrouting networks running the microrouting protocol effectively extend the connectivity of sparse ad hoc networks.
Currently, we are investigating several uses of and issues in deploying microrouting networks. We plan to study how to use cross-layer techniques to efficiently integrate μRP and other lower layer energy conserving protocols such as SMAC [28] to further increase the lifetime of microrouting networks. We are studying security and trust extensions to μRP to enable its deployment in hostile environments such as battlefields. Since critical applications can benefit from group communications (e.g. between all medics in an area), we plan to study multicast and anycast extensions to μRP. We are also looking at whether localization and position estimation techniques in microrouters can improve the performance of microrouting networks and provide location-aware services to mobile nodes without using GPS. In such situation geographic routing and location service schermes tailored for microrouting networks are an interesting issue of research. Another interesting convergence area is whether a microrouting network can also be used for sensing. Many scenarios can be envisioned in which both functionalities may be required. A key question is whether a single integrated protocol can efficiently provide many-to-one and any-to-any communication in such an integrated network.