
Abstract

The Hamilton Company has served the scientific community for nearly 50 years, providing innovation in precision liquid handling technology. Founded on analytical syringe technology, Hamilton has diversified its expertise and technology to encompass semi-automated and fully automated liquid handling instrumentation.
Hamilton was the first to provide microliter syringe technology and later pioneered the first Cartesian laboratory robotics. Hamilton's innovation and advancement stem from world-class engineering and manufacturing facilities in Reno, Nevada and Bonaduz, Switzerland. Both facilities are committed to detail, quality, and service, earning Hamilton ISO-9001 certification.
There is a new energy at Hamilton with the introduction of three new products to the robotics market. Each offers improved design and new technologies for more reliable and usable automation. The new MICROLAB STAR (Figure 1), Hamilton's flagship liquid handling platform, was introduced to the American market in January at LabAutomation2001 in Palm Springs, California.
The new MICROLAB STAR. The STAR is an automated liquid handler featuring several new technologies including the patented CO-RE technology, Dynamic Positioning System, and Monitored Air Displacement pipetting.
STAR Introduction
Hamilton recognized a deficit in available liquid handling platforms. Automated liquid handling, although increasingly sophisticated, still contended with problematic disposable tips, non-independent channel spreading, and restricted platforms. Hamilton designed the MICROLAB STAR specifically to improve robotic technologies in these areas, creating a liquid handling platform ideally suited for multiple applications in the pharmaceutical and biotechnology industries.
The MICROLAB STAR is a multi-channel robotic pipetting platform designed to accommodate multiple applications in the life sciences. The STAR features several technological innovations improving flexibility, process reliability, and utility during every step of liquid transfer. The STAR offers patented tip coupling technology, interchangeable disposable and steel tips, novel liquid level detection, monitored air-displacement pipetting, independently spreadable pipetting channels, improved contamination prevention, and enhanced throughput options. Each feature is described in detail below.
CO-RE (Compression-induced O-Ring Expansion): Tip Coupling Technology
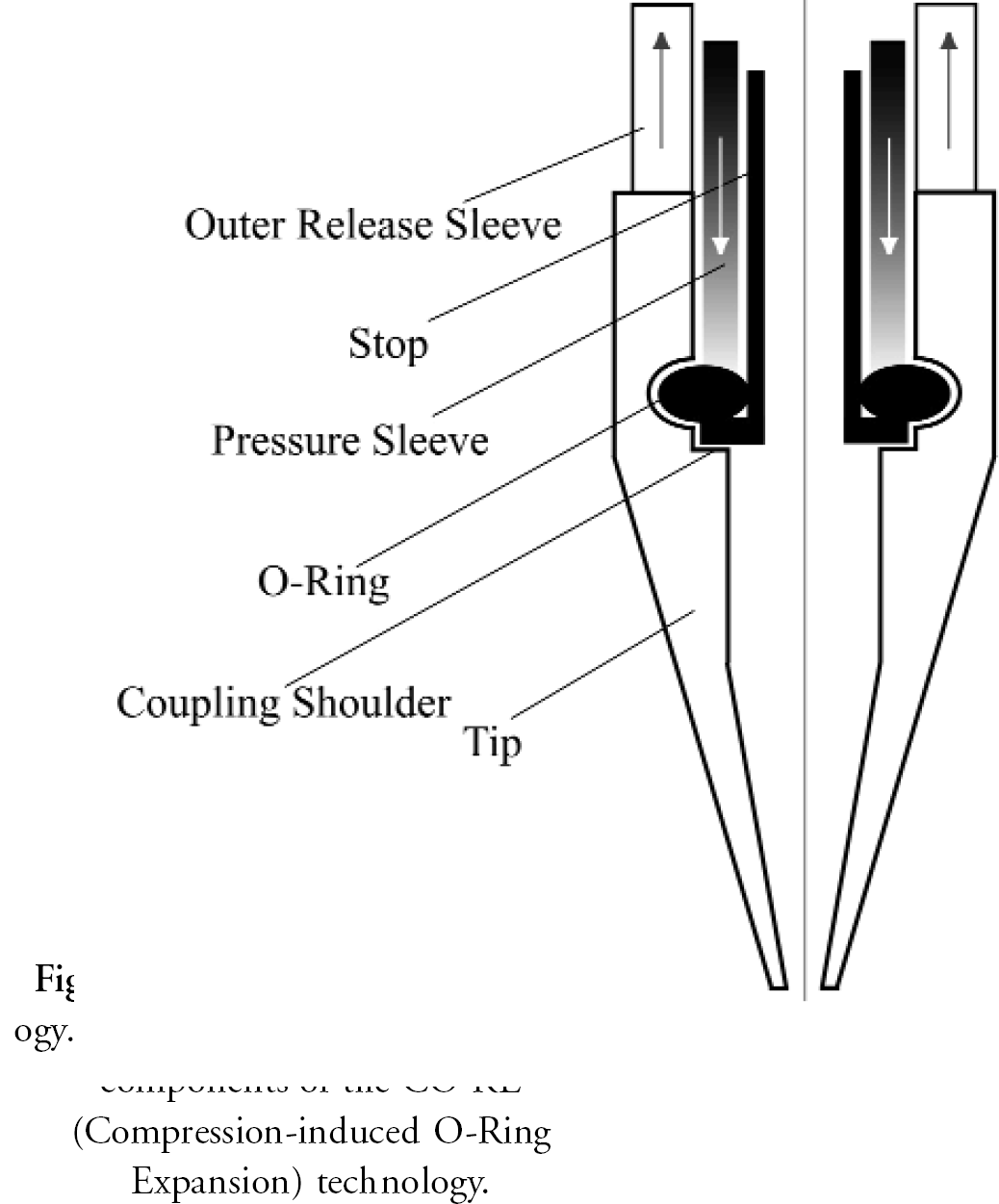
The patented CO-RE technology is a central component to the MICROLAB STAR. CO-RE (Figure 2) is the mechanism by which the tip is positively coupled to the pipetting channel, resulting in consistent, secure sealing and accurate positioning. The mechanism is based on the compression of an O-Ring at the base of the pipetting channel. As the base of the pipetting channel comes into contact with the tip, the tip edge pushes the outer release sleeve up and the pressure sleeve of the channel settles into the coupling shoulder inside the tip. When the force of the channel-tip contact is detected and the channel is positioned against the coupling shoulder, a motor is activated, compressing the O-ring at the base of the channel and radially expanding the O-ring into a specific groove inside the tip, completing the seal.
Although the mechanism of CO-RE is relatively simple, the implications of the technology are significant. A primary consequence of CO-RE is advanced disposable tip technology. In addition, every tip is monitored for successful tip coupling. Reduced force during coupling and ejection allow efficient tip coupling, minimized mechanical wear, and prevention of aerosol formation. Tips of various sizes can be coupled with one channel. The STAR can also measure pressure inside the tip, due to the combination of the CO-RE technology and the air-displacement system, enabling the additional detection and monitoring systems discussed below.
CO-RE Technology: Disposable Tips
Traditionally, disposable tips have the disadvantages of poor sealing and leaks, imprecise positioning, aerosol production during tip ejection, non-interchangeable use of disposable or steel tips, and the inability to use various tip sizes on one channel. The CO-RE technology of the STAR addresses these problems and offers solutions for improved process reliability.
The probe head of traditional disposable tip pipetting systems attaches to a tip by forcing the conical probe into the tip, creating a line seal. This is known as interference fit. Any imperfections of either the probe head surface or the tip lead to unpredictable sealing. Both scoring of the probe heads and tip variation, which are inherent due to production techniques, disturb proper seal production. Imperfections of the probe head or the tip can cause non-ideal sealing, leading to poor pipetting performance.
Positional accuracy is also challenging with interference coupling. The interference mechanism does not provide a mechanical guide or verification to ensure precise tip positioning. This means the channel and tip can produce a seal without perfect perpendicularity of the tip to the target labware, increasing the possibility for positional errors and crashes, thereby inhibiting high density microplate pipetting.
Such imperfections of disposable tips are addressed by the CORE technology of the STAR. Due to the CO-RE coupling mechanism, the STAR creates consistent seals with excellent positional accuracy. Since the seal is not dependent on the integrity of the channel or the tip, the seal and therefore the precision of the liquid handling system does not erode with time. In addition, the combination of the coupling shoulder and groove inside the tip with the O-ring mechanism of the channel ensures excellent positional accuracy of both disposable tips and steel probes.
During tip ejection, interference fit tips produce aerosols which potentially lead to cross contamination. Aerosol production results from displacement of residual liquid in the tip by high force loads typically needed for tip ejection. The CO-RE mechanism minimizes aerosol production during tip ejection by applying minimal force to the tip. The expanded CO-RE O-ring is simply released, allowing the tip to drop safely into the waste container, without aerosol formation or contamination.
For many liquid handling procedures, such as reagent aliquoting, a disposable tip is considered unnecessary. Allowing a choice between steel or disposable tips provides the necessary contamination control of disposable tips along with cost containment. However, with traditional interference coupling, steel probes cannot be attached without damage to the conical probe head. The CO-RE technology allows interchangeable use of steel probes and disposable tips, using the same channels. Since CO-RE is a positive coupling mechanism with no high force loads, neither steel nor disposable tips will damage the channel. Therefore, there are no restrictions concerning steel or disposable tip use, allowing interchangeable, flexible use of either tip type.
Interference fit coupling mechanisms require each tip size to correspond to a particular channel size. This necessity restricts volume ranges for a given robot configuration. With the CO-RE technology, varied tip sizes are compatible with the STAR channels. The STAR is configured with one of two channel sizes, high or low volume. The external geometry of the low volume channel is the same as the high volume channel, so that tip sizes are interchangeable for every channel. However, some restrictions apply due to the geometry of the internal plunger of the low volume channel, which was optimized for low volume accuracy. The compatibility and range for tips and channels is addressed in Figure 3.
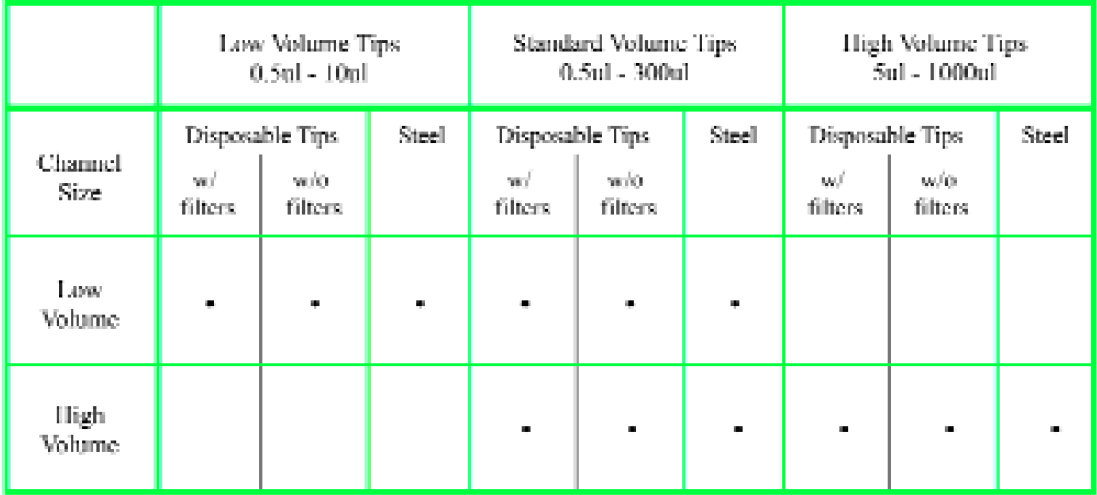
Pipette Channel/Tip Compatibility. Although the external geometry of the low and high volume channels are the same, the low volume channel internal air displacement plunger mechanism is different to enhance low volume accuracy. This chart describes the tips and channel compatibilities for optimal pipetting accuracy.
Liquid Level Detection: Capacitive and Pressure-based Systems
Accurate and reliable liquid level detection (LLD) is essential for pipetting accuracy, minimization of cross contamination, and reliable aspiration. Current automated liquid handling robots detect liquid surfaces by a combination of local capacitance and conductivity measurement. When the tip comes in contact with the liquid surface, a sharp change in capacitance is measured, indicating the location of the surface (Figure 4). Accurate capacitive LLD, however, is restricted to conductive and polar liquids in relatively large volumes in certain labware containers.
The STAR offers a new pressure-based LLD system, along with the more conventional capacitance LLD (cLLD) system. Pressure LLD (pLLD) allows surface detection of non-polar and non-conductive liquids, such as DMSO and distilled water, in small volumes in a wide range of labware, including 384 well microplates.
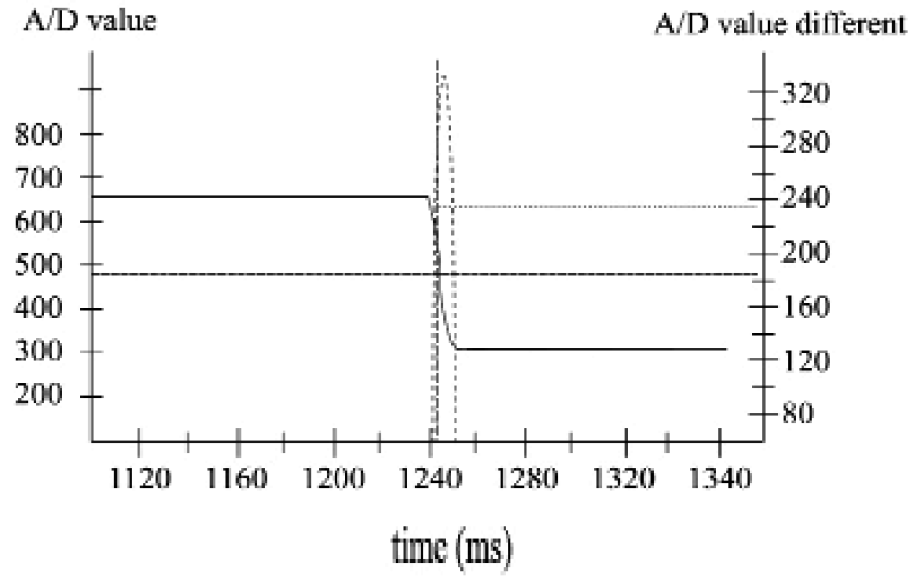
Capacitive LLD (cLLD). The left axis represents capacitance signal in arbitrary units. The curve shown as a solid line is a function of time after the tip starts moving towards the liquid. The capacitance of the air is approximately 660 units. The capacitance of the liquid is approximately 325 units. The middle horizontal line is the mean capacitance. The point of liquid detection is indicated by the upper horizontal line. The gradient curve is shown. The liquid detected is 0.1% KCl.
The strong tip seal provided by the CO-RE technology allows real-time detection of pressure inside the tip. pLLD operates by slow aspiration of air as the tip approaches the liquid surface. When the tip comes in contact with the liquid surface, the pressure inside the tip decreases (Figure 5). The STAR detects this decrease in pressure, and indicates the liquid position. The tip is then raised above the liquid surface and the small amount of liquid aspirated during liquid level detection is dispensed. The channel then returns to the appropriate aspiration height and aspirates the full volume.
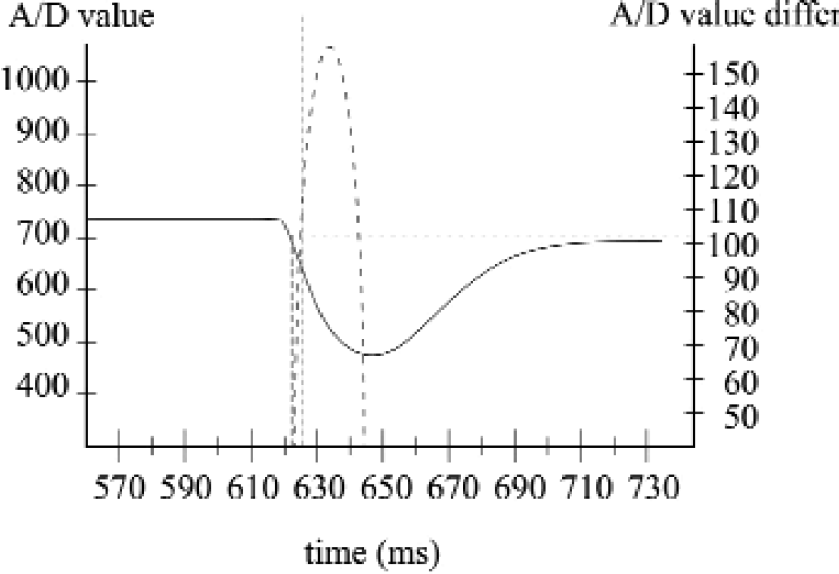
Pressure LLD (pLLD) The left axis represents the pressure signal in arbitrary units. The curve shown as a solid line is a function of time after the tip starts moving toward the liquid surface. The pressure of the air gap inside the tip before liquid is detected is approximately 730 units. The pressure drops with liquid contact. The point of detection is indicated by the vertical line. The gradient curve and the threshold point are also shown. The liquid detected is 0.1% KCl.
Both cLLD and pLLD detect the surface in less than 10 msec after the start of the signal change. At the liquid level, the capacitance measurement reaches the minimum value in <10 msec. The rate of change for pressure is slower due to plunger speed, flow rate of the liquid into the tip, and the density of the liquid.
The combination of cLLD and pLLD provides new utility for liquid level detection systems, including fully automated liquid-liquid extraction and liquid level detection through heterogeneous surfaces, such as bubbles.
Monitored Air Displacement (MAD)
The MICROLAB STAR uses an air-displacement pipetting principle, which is analogous to a hand-held pipette. Air-displacement pipetting systems move fluid by applying a vacuum or negative pressure by movement of an internal plunger. The liquid is separated from the plunger by an air gap. One benefit of air-displacement pipetting is that there is no system liquid or complicated plumbing. This eliminates the possibility of leaks or contamination of either the system with samples or dilution of the sample by the system liquid.
The STAR uses a combination of air displacement and pressure measurement systems to monitor aspiration. During aspiration, the pressure of the air gap has a standard behavior (Figure 6). As aspiration begins, a slight vacuum is created and the internal pressure drops. During aspiration, the pressure eventually increases and plateaus. The difference between the plateau value and the initial pressure value is the hydrostatic pressure of the liquid. By measuring the internal pressure, the STAR recognizes aberrant pressure curves, such as aspiration failure due to insufficient reagent or clot formation. Both of these situations have a stereotypical pressure curve, which the STAR recognizes and subsequently it alerts the user to the failure.
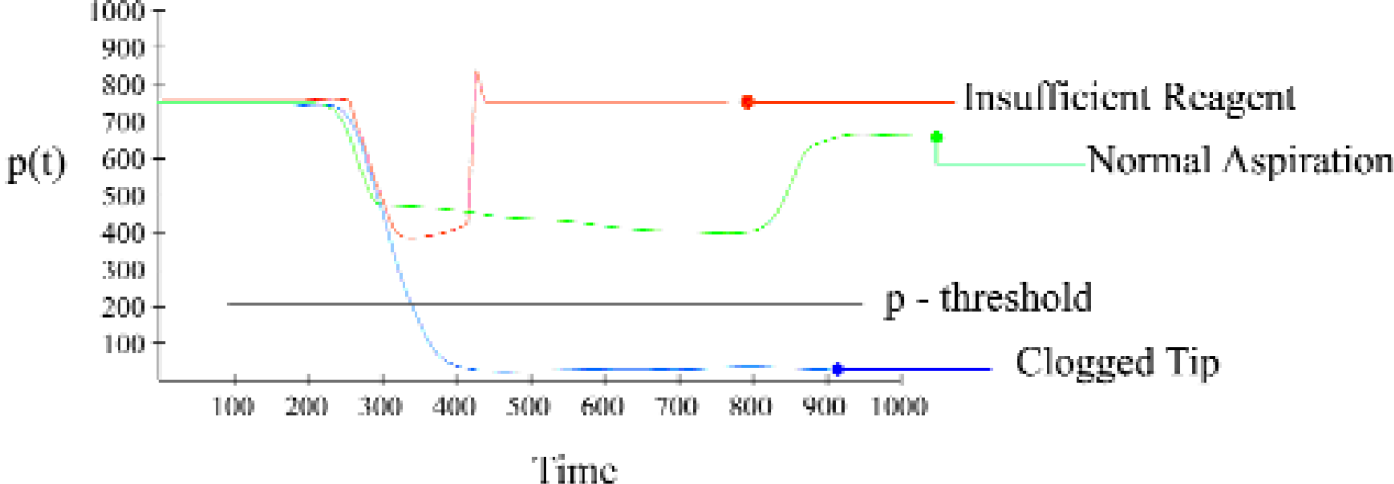
Monitored Air Displacement. The graph represents pressure sensor data taken from inside the CO-RE head during three aspiration cycles. The curve labeled “Normal Aspiration” indicates the air gap pressure inside the tip as the head moves toward the liquid surface, finds the surface (at 240ms), and aspirates (500ms duration). The curve labeled “insufficient reagent” represents absence of liquid during aspiration. The third curve represents the pressure curve of a clogged tip during aspiration. These data allow the system to alert the user to pipetting errors.
Dynamic Positioning System
The Dynamic Positioning System (DPS) allows all pipetting channels to move independently in the Y- and Z-axes. Current lab automation with spreadable channels requires equal spreading between each channel. Using DPS, every channel moves independently, allowing unequal spacing between individual channels (Figure 7). This allows every channel to reach any position on the deck. Channel use is optimized through the software, so every channel is used most efficiently.

Dynamic Positioning System (DPS). The Dynamic Positioning System of the STAR allows independent Y- and Z-axis movement. Pipetting channels can move independently for non-uniform spreading and unlimited deck access for each channel.
Autoload
The Autoload option is a positive identification system as well as a software-controlled, guided operator interface. The Autoload option provides programmed loading and unloading of labware carriers, labware confirmation, and horizontal or vertical barcode reading without interrupting the run. The correct positions for carrier loading are lighted to ensure appropriate processing. This allows the addition of tips and fresh reagent or removal of processed microplates by the operator without interrupting the run.
STAR Performance
These technological advancements will have a significant impact on the performance of the STAR. Here we present data on pipetting accuracy and precision, positional accuracy and precision, and carryover data.
Pipetting specifications of the STAR were tested under controlled laboratory conditions with a standard solution (0.1% NaCl, 0.01% Tween). The trueness (R) and precision (CV) are calculated to include all 8 channels (Figure 8). The tips for the STAR are low (0.5μl − 10μl), standard (0.5μl − 300μl), and high volume (5μl −1000μl) tips. The trueness and precision results easily surpass standard ISO/DIS 8655 criteria.
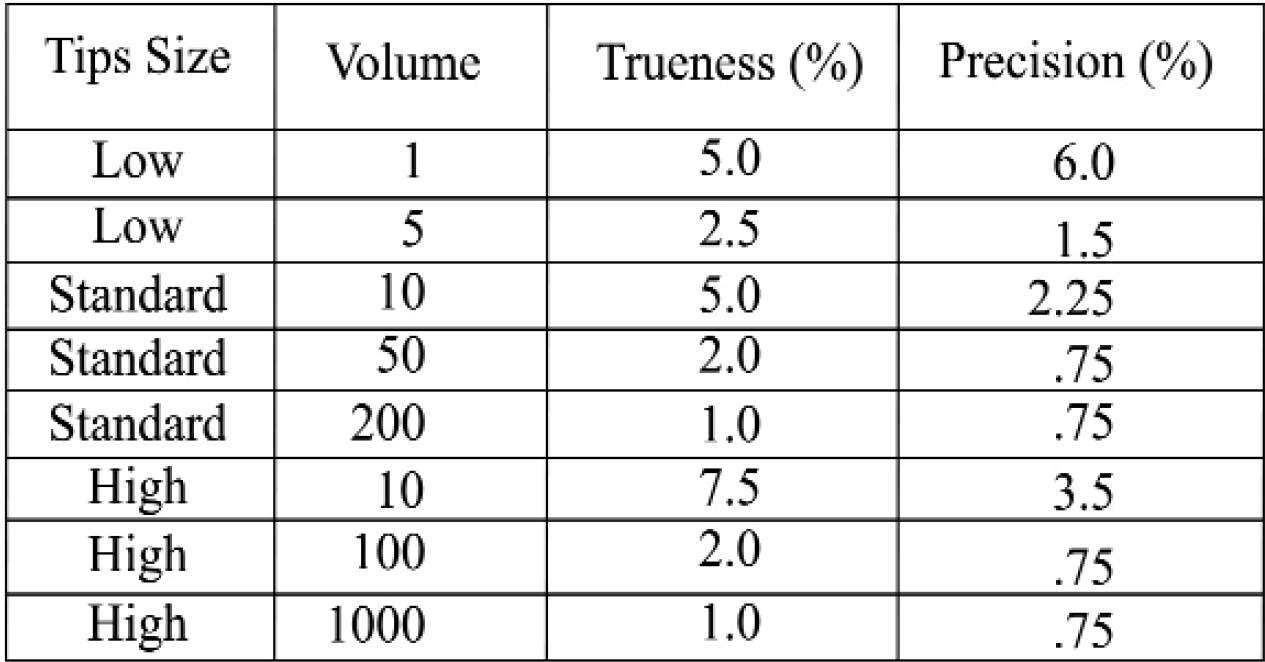
Pipetting Accuracy and Precision. The calculations for accuracy and precision include 8 channels. Measurements are performed under controlled laboratory conditions.
The positional accuracy and reproducibility were tested by aspirating and dispensing 0 μl into putty filled plates. The depth and scatter of the indentions into the putty were then measured. The positional accuracy of the STAR is noted in Figure 9.
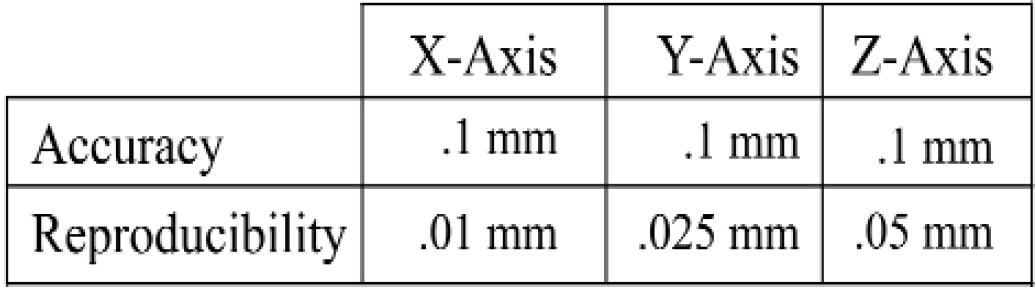
Positional Accuracy and Reproducibility.
An experiment was performed to detect cross contamination produced by the STAR. An array of concentrated viral samples (≤1012 Parvo B19) were pipetted into 5ml tubes, interspersed with blank tubes. After every 8 samples, the tips were ejected and replaced with new tips. The samples were tested for the presence of virus by PCR. The blank controls were found to be virus free, demonstrating the prevention of cross contamination by the STAR.
Summary
The technologies of the STAR discussed here are a result of a focused engineering effort to improve robotic liquid handling for the applications of the biotechnology and pharmaceutical industries. The improvements in disposable tip technology, independent probe positioning, monitored air displacement, and the Autoload option expand the realm of liquid handling robotics by improving process stability and functionality. Several errors inherent in current lab automation will be eliminated or greatly reduced, such as tip attachment failure or aspiration failure without notification.
Improved process reliability leads to better, more consistent analytical results. In addition, due to the liquid handling capabilities of the STAR, protocols previously too sensitive for automation may now be automated.
The primary result of the technological advancements of the STAR is the creation of automated liquid handling that is more useable. The errors and frustrations of liquid handling automation have been addressed and improved upon. This allows for a greater number of protocols to be automated and more reliable outcomes for currently automated procedures. In the end, improved automation leads to better and faster results for drug discovery and the life sciences.