
Abstract

INTRODUCTION
The basic task of a high throughput screening (HTS) system is to move microtitre plates from one processing module to another in the most efficient way. If this were the only requirement of an HTS system, “production line” systems consisting of processing modules connected in a fixed sequence to automate a particular assay would always provide the highest possible throughput.
However, automated HTS systems must also provide flexibility to keep up with changing assay demands. Scientists must be able to change the sequence in which plates move from one processing module to another, and that requirement necessitates a flexible means for moving plates among the modules. Since most laboratory equipment has been (and still is) designed for use by humans, an articulated robotic arm that imitates human motion has proven to be extremely versatile and effective in automating HTS systems. 1
Now, however, the burgeoning demand for ultra HTS, which requires the parallel feeding of many processing modules at one time, has demonstrated that a single robotic arm has become the bottleneck in the process, and is limiting the possible throughput rate.
The problem is how to attain ultra HTS without sacrificing the flexibility to change assays? The solution lies primarily in the development of multiplate transport hardware and software, to “… have the robot carry multiple items simultaneously, liberally incorporate self-feeding devices, and add some flexibility in process scheduling. It is time to make our robots work smarter, not harder.” 2 The stacker technique reviewed in this article accomplishes this goal by having an articulated robotic arm move entire stacks of plates among workstations that have been optimized to perform a particular task. The system is capable of attaining the throughput of a dedicated production line system while maintaining the flexibility of systems built around an articulated robotic arm.
HOW THE STACKER TECHNIQUE WORKS IN HTS
In principle the stacker technique is very similar to the workstation approach employed in many labs. It is not unusual to find assays being performed in batch mode with human operators moving stacks of plates among various plate processing instruments. Many instrument companies have already equipped their devices with stackers and shuttle mechanisms, providing extended capacity and semi-automated use to their customers.
Wildey et al. 3 , have noted that, “… the best of worlds for HTS would be created if we could just interconnect these workstations via some simple and highly reliable system.” 3 The stacker technique permits a robot to move the stacks, thus eliminating the need for human operators. Because the entire process is under the control of a central scheduling computer, researchers can also get consistent plate-to-plate timing, automated data capture, and detailed audit trails for all samples and operations.
The CRS ultra high throughput stacker system, for example, uses a CRS A465 or F3 articulated robotic arm equipped with a pneumatic gripper that grabs a CRS-modified Titertek stacker magazine. Each magazine holds up to twenty 96-, 384- or 1536-well plates. The arm moves the magazines among various processing and storage instruments, each of which is equipped with a Titertek stacker mechanism. When the arm places a stacker magazine in the instrument, the instrument retrieves each plate from the input stack, processes it, and then temporarily stores it in an output stack. When the instrument has processed a complete stack, it shuffles the plates in the output stack back into the input stack, in order to maintain first-in/ first-out plate ordering. The plates never leave the magazines except when they are inside an instrument. The entire process is scheduled and controlled by CRS' POLARA™ software.
This stacker-based system allows a very high degree of flexibility for the process sequence, highly parallel operation, re-use of instruments in an assay sequence, and easy adaptation to new instrumentation.
STACKER TECHNIQUES IMPROVE FLEXIBILITY
Due to the constantly changing nature of the HTS process, providing flexibility to various degrees is a fundamental necessity of an effective automation system. The stacker technique improves HTS system automation flexibility in several ways.
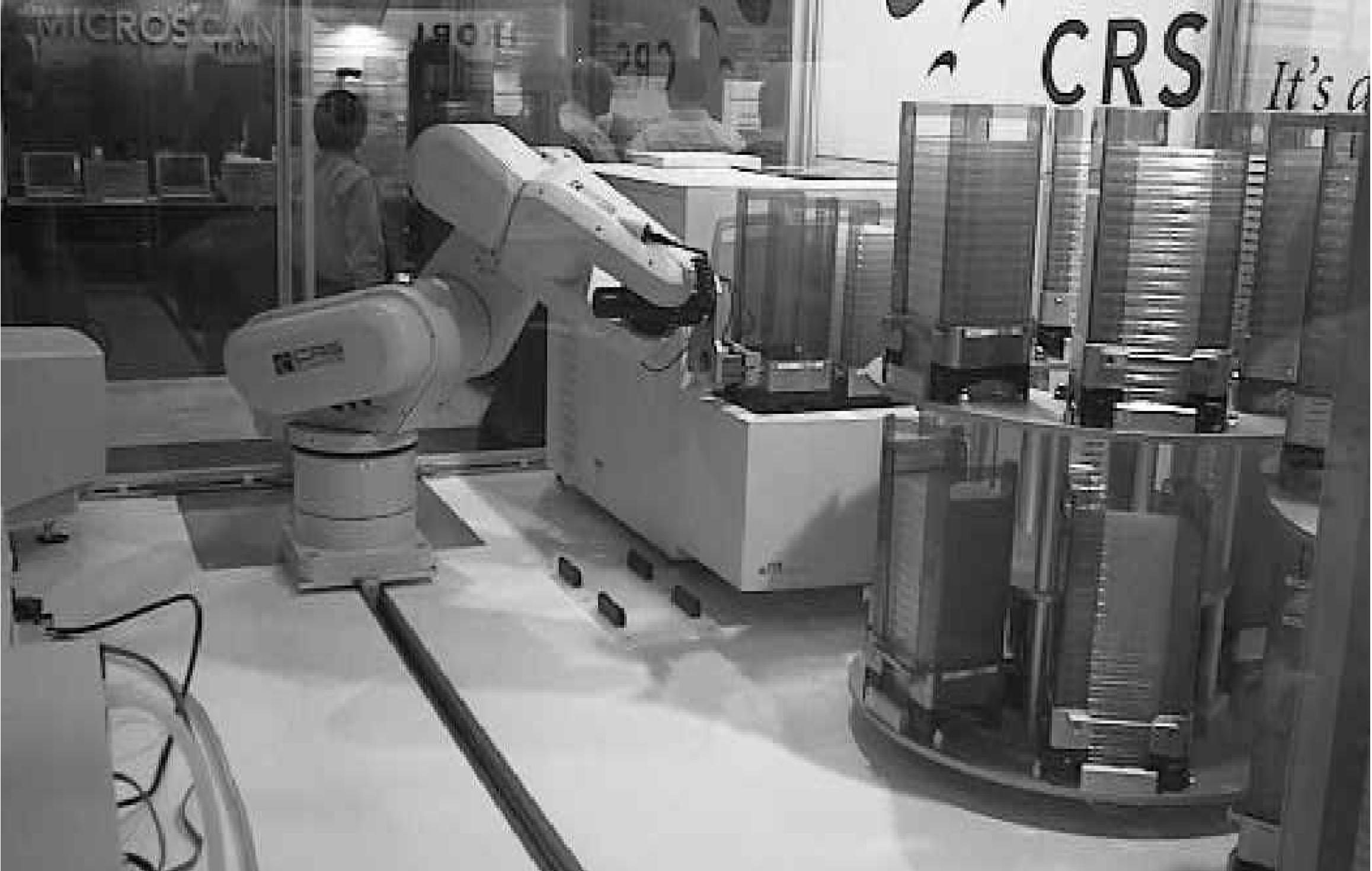

CRS A465 robot arm moves a stack of plates into an instrument.
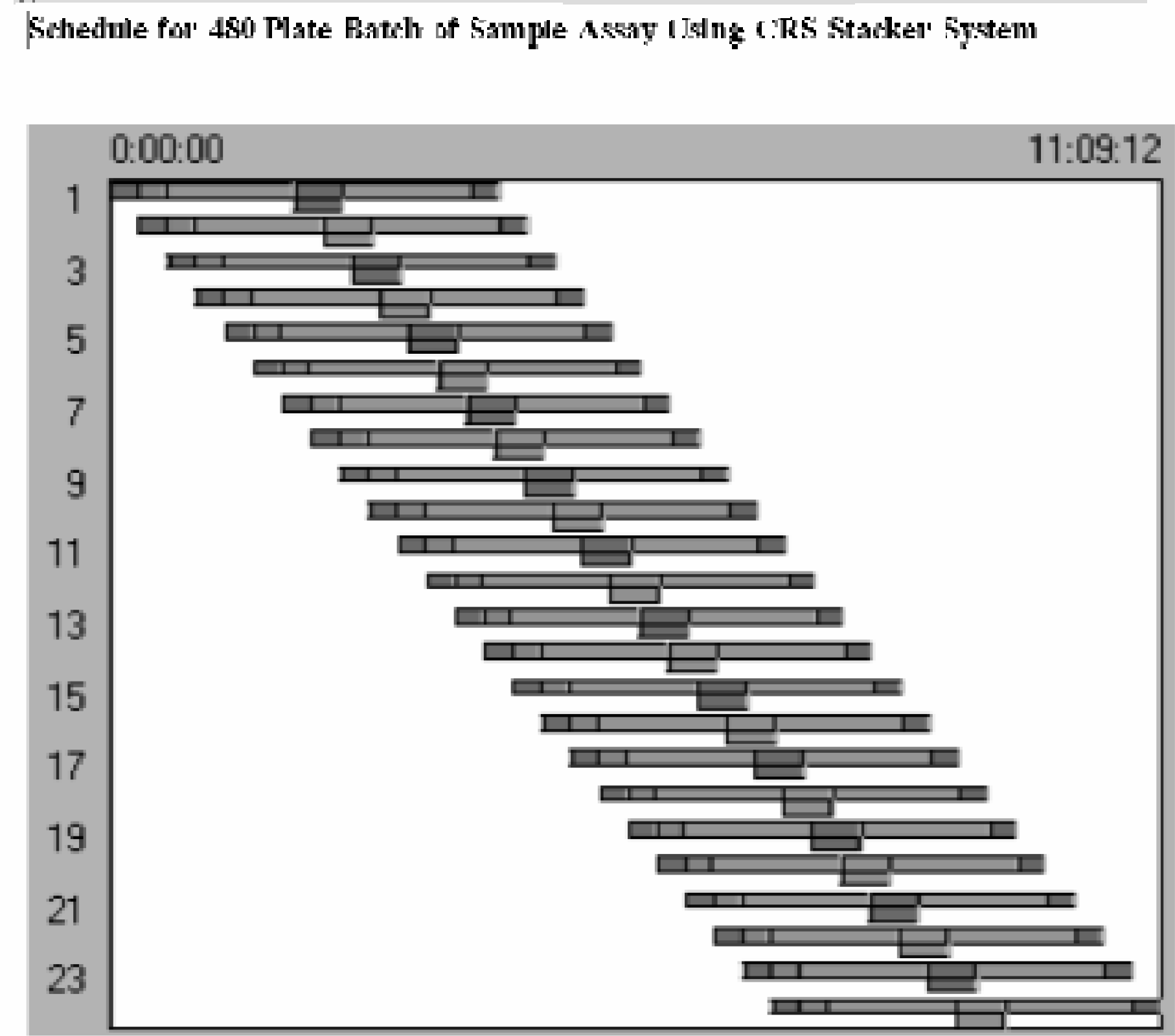
CRS Polara™ software schedules stacker magazines through an assay.
First, because the robot can access the instruments randomly, the process sequence is not limited by the physical order of the instruments. There is no need to rearrange them to perform a new assay: one simply enters the protocol and the system executes the new sequence. Nor does the system require multiple instances of the same instrument to repeat a processing step on a plate, as it would in a production line type of system. It simply returns the plate to one instrument whenever it needs to repeat that processing step.
Second, stacker mechanisms with integrated pick and place devices can be integrated into most of the microplate processing instruments available on the market today. Users of a stacker-based HTS system can therefore choose the instrument best suited to their needs and are not forced to sole-source their instruments from a single automation supplier. The plug & play capability of the CRS POLARA software allows the simple integration of new instruments.
STACKER TECHNIQUES BOOST THROUGHPUT
The use of stacker techniques in a robotic arm-based HTS system provides throughputs rivaling those of dedicated production line systems, because it “parallelizes” plate movement in the same way that a conveyor or multi-robot system does. The mover bottleneck observed in traditional plate based systems is eliminated. In a stacker-based system, the bottleneck gets shifted from the plate mover to the instruments. This permits a system administrator the freedom to improve system performance by adding extra instruments or other process devices to eliminate bottlenecks. The maximum throughput achievable is now only limited by the number of instruments that can be positioned on a stacker system platform.
Throughput is usually considered a direct result of the number of plates a system can process in a given time period. But this number does not take into account other, indirect factors, such as loading and unloading of a system. For many systems, the loading and unloading might consume between 10–15% of the total operation time (for an eight hour day). If an operator can load an entire stack of up to 20 plates at a time, the loading and unloading time of the system can be drastically reduced. For large batches, the time savings can increase the overall output of data points quite significantly.
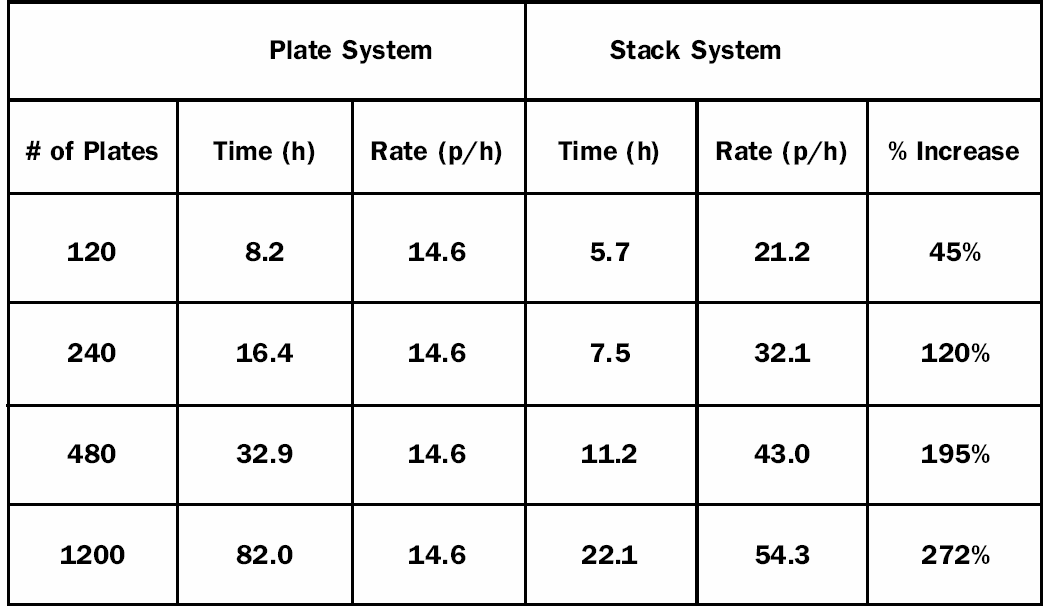
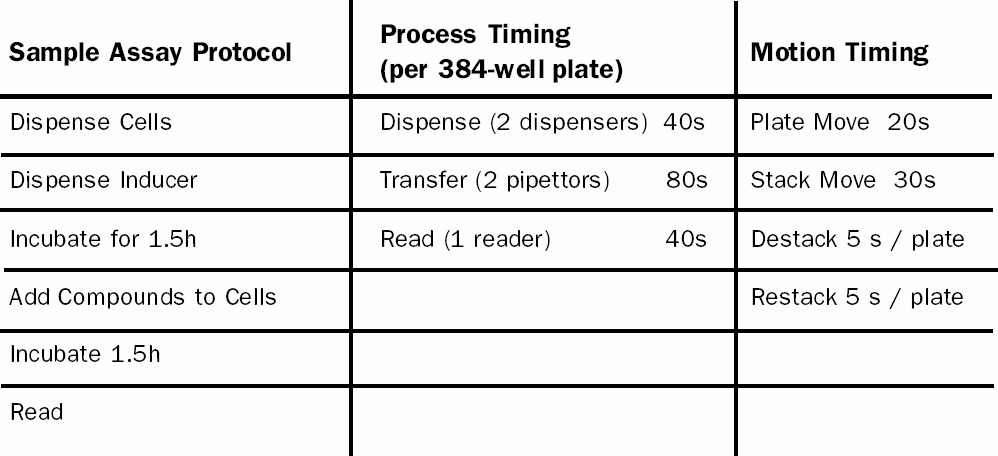
Table 1 shows a comparison of the throughput on plate-based and stacker-based systems for a typical cell-based reporter assay (The assay protocol and timing assumptions used to generate this data are shown in Table 2). Table 1 demonstrates how the parallel processing of plates in a stacker-based system contributes to the ultra high throughput rate. The stacker-based system is able to process a batch of 120 plates 1.45 times faster than a traditional plate-based system. The stacker-based system throughput continues to increase with increasing batch sizes, due to the fact that the system spends a larger proportion of the time operating at peak efficiency, with the ramp-up and ramp-down times being a smaller portion of the total run time. At a batch size 10 times larger (1200 plates), the stacker system has increased the plate throughput 3.72 times over the rate of the plate-based system. Within a 22 h time period, the stacker-based system would have produced 460,800 data points in a 384-well microtiter plate format.
The plate-based system, on the other hand, is limited by the plate mover to a maximum of 14.6 plates per hour. The plate density of stacks offers a much larger batch capacity compared to plate-based systems, which store plates on shelves. Only five stacker magazine carousels are required to provide a capacity of 1200 plates, enough for a full day of operation at the ultra HTS rate without reloading the system. A stacker-based system platform performing the assay described in Table 2 would measure a size of only 2.0 m by 4.5 m.
STACKER TECHNIQUES SIMPLIFY LID HANDLING
Handling of lids in an HTS system remains one of the most critical operations, one that is prone to failure despite the many attempts by plastic manufactures to improve the style and type of lids used in automation.
Furthermore, lid handling slows down the throughput of a system since lids have to be removed and restored when plates enter or exit such peripheral modules as liquid handlers, dispensers, washer or detectors.
In a stacker-based system, on the other hand, there are no lids to handle: each plate in the stack acts as a lid for the plate below (an extra, empty plate is used on the top of the stack to lid the top plate). This self-lidding feature of stacks increases both throughput and reliability over systems that require the use of lidded plates.
OTHER BENEFITS OF EMPLOYING STACKER TECHNIQUES
As well as increased throughput and flexibility, there are several other advantages to processing plates in stacks. Scheduling is greatly simplified, since only the motions of the stacks of plates need to be explicitly scheduled. Motions of the individual plates in a stack are controlled by the individual instrument drivers and do not need to be considered by the system scheduling software - the system only has to know the total time an instrument takes to process a stack.
The CRS POLARA software also has the ability to schedule multiple methods in parallel. Each stack in a run can be processed with a different method. This capability is extremely useful if a set of similar methods with different parameters (e.g., incubation times) is run to develop or optimize an assay protocol.
Stacking also provides increased storage density, allowing larger batches to be processed. This increases both system throughput and walk-away time. Unlike workstation approaches (and many of the production line type systems), CRS stacker-based systems are designed for hours of unattended operation, freeing lab personnel to perform other important duties. Key to this is the use of proven, reliable mechanisms and effective error recovery routines built into the software to limit the impact of failures.
SUMMARY
Recent discussions about HTS approaches seem to concentrate on two extreme positions: workstations or dedicated production line systems. 4,1,3 The stacker technique fills the void between these approaches, providing high flexibility at ultra HTS rates. A stacker-based system provides random access to instruments, very simple scheduling and the ability to run different methods in parallel. The use of stackers also speeds loading and unloading of the system, provides high-density storage, and automatic lidding of the plates. Finally, use of proven instrumentation and the advanced error recovery features of the POLARA software allow high reliability and 24 hour operation.
Although optimal automation solutions for HTS and ultra HTS will ultimately depend on the specific needs of a screening operation, CRS stacker technology represents a viable alternative to current ultra HTS screening solutions at lower investment costs.